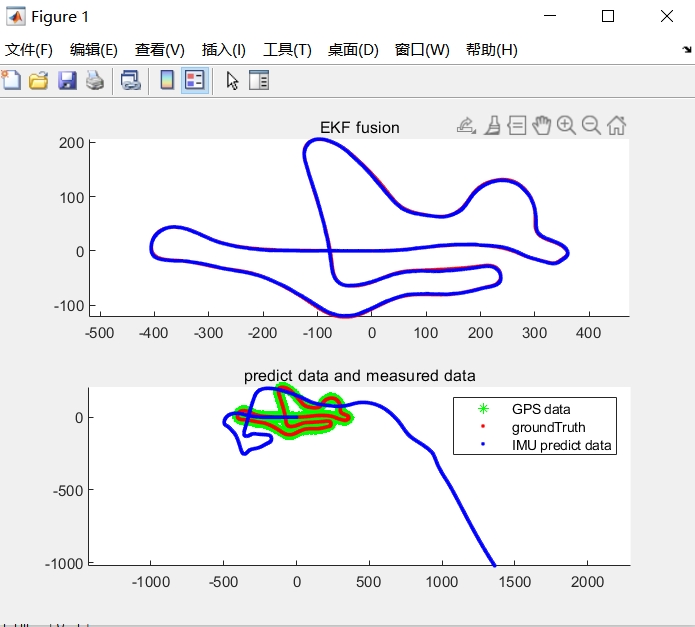
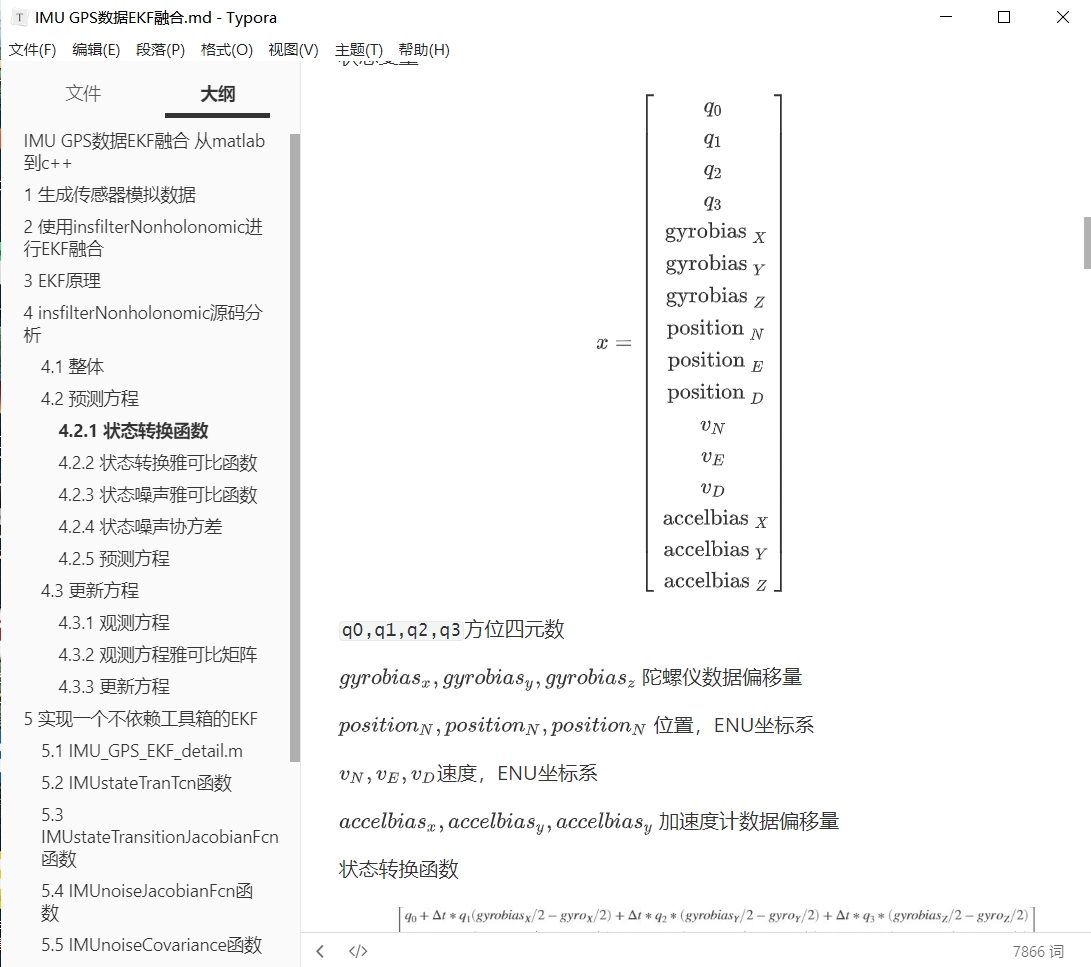
IMU和GPS ekf融合定位 从matlab到c++代码实现
基于位姿状态方程,松耦合
文档原创且详细
YID:6745659043907933 autorobot
autorobot


IMU和GPS ekf融合定位 从matlab到c++代码实现
基于位姿状态方程,松耦合
文档原创且详细
YID:6745659043907933autorobot
在上方输入框输入您的关键词,然后点击搜索,词语越短越好(2个字最佳)
QQ客服:27699885 微信客服:shujuqudong1 微信客服:shujuqudong6
本站为优质资料,数量有限,如果找不到需求,可查阅全站 https://wekup.cn/ 资源更丰富


