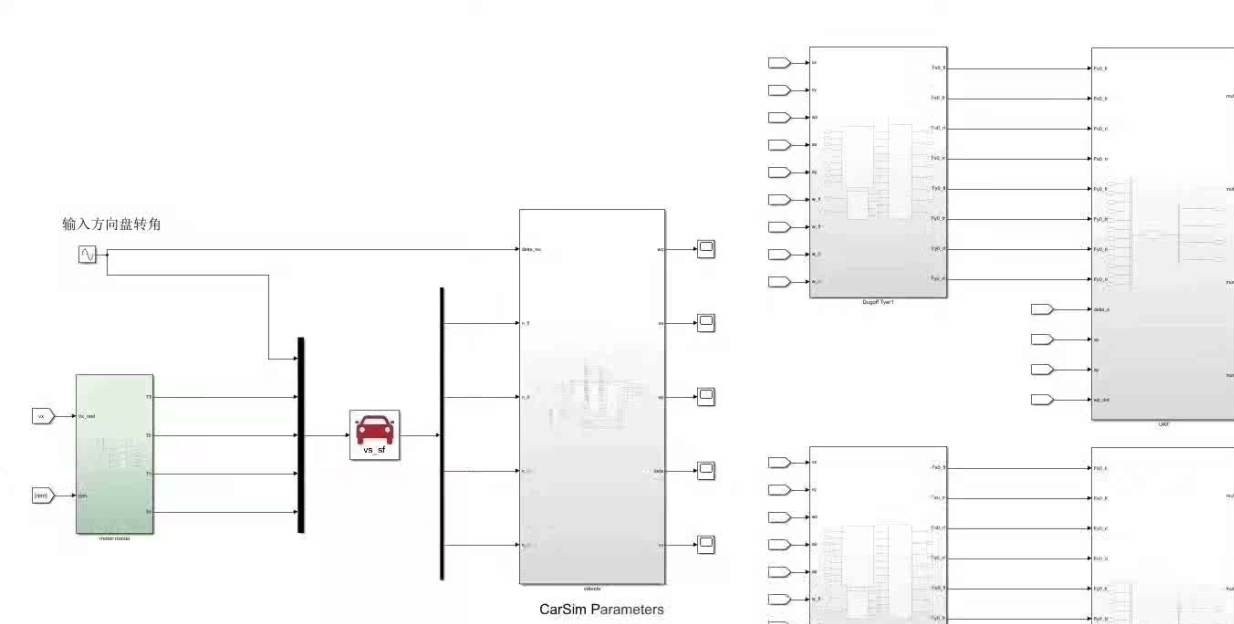
基于分布式驱动电动汽车的路面附着系数估计,分别采用无迹卡尔曼
滤波(UKF)和容积卡尔曼滤波(CKF)对电动汽车四个车轮的路面附着系数进行估计。
可在高速,低速下,对开路面,对接路面四种组合工况下对路面附着系数进行准确估计估计。
该模型的两种估计算法均由S-function编写,可比较二种滤波的估计效果。
YID:8514796951548176 依依学姐
依依学姐
基于分布式驱动电动汽车的路面附着系数估计,分别采用无迹卡尔曼
滤波(UKF)和容积卡尔曼滤波(CKF)对电动汽车四个车轮的路面附着系数进行估计。
可在高速,低速下,对开路面,对接路面四种组合工况下对路面附着系数进行准确估计估计。
该模型的两种估计算法均由S-function编写,可比较二种滤波的估计效果。
YID:8514796951548176依依学姐
在上方输入框输入您的关键词,然后点击搜索,词语越短越好(2个字最佳)
QQ客服:27699885 微信客服:shujuqudong1 微信客服:shujuqudong6
本站为优质资料,数量有限,如果找不到需求,可查阅全站 https://wekup.cn/ 资源更丰富


