UR5机械臂PID轨迹跟踪控制控制,六自由度机械臂simscape物理仿真,需要可以提供DH参数表,坐标系表示,三维模型,可以导出角度,角速度,角加速度以及力矩,误差曲线图
YID:5835727225969763 协作机器人仿真
协作机器人仿真
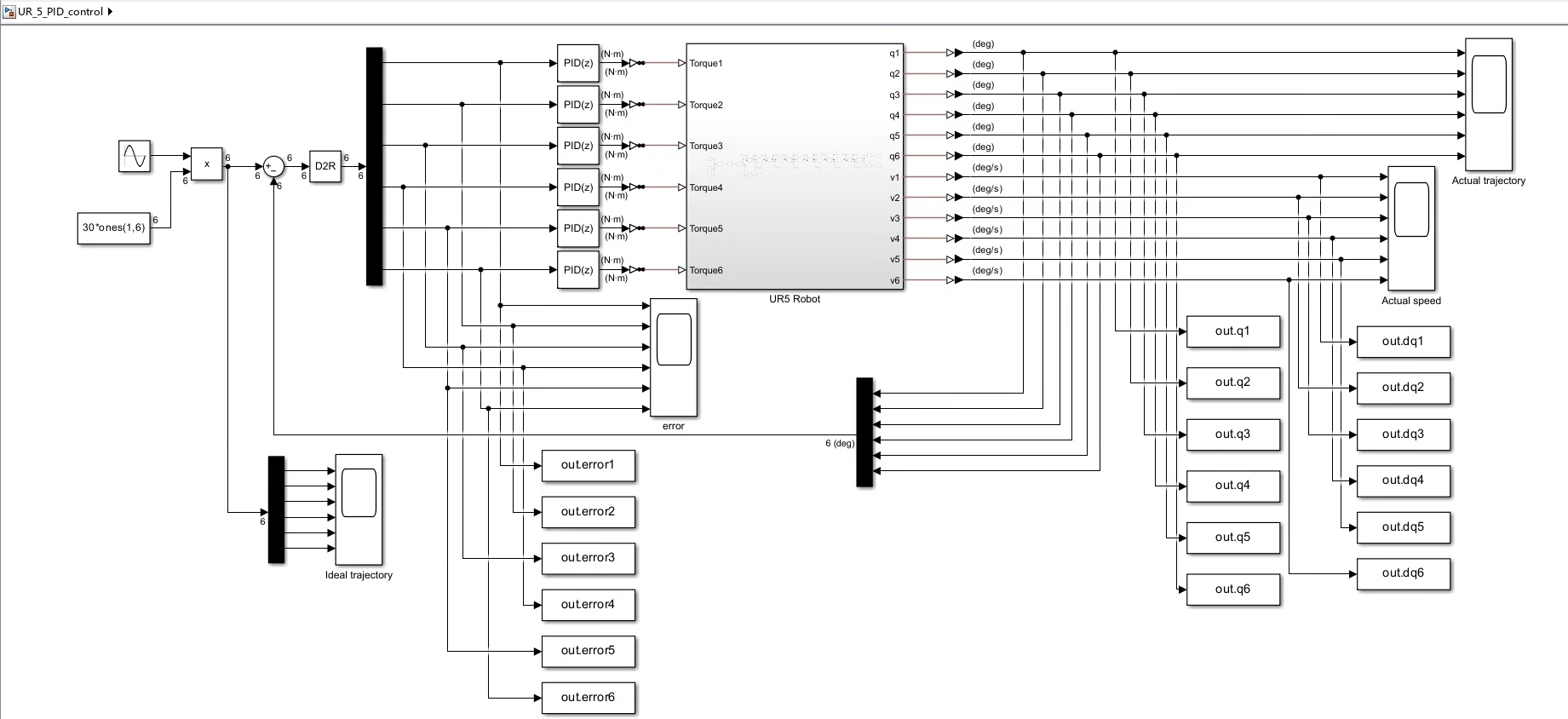
UR5机械臂PID轨迹跟踪控制控制,六自由度机械臂simscape物理仿真,需要可以提供DH参数表,坐标系表示,三维模型,可以导出角度,角速度,角加速度以及力矩,误差曲线图
YID:5835727225969763协作机器人仿真
在上方输入框输入您的关键词,然后点击搜索,词语越短越好(2个字最佳)
QQ客服:27699885 微信客服:shujuqudong1 微信客服:shujuqudong6
本站为优质资料,数量有限,如果找不到需求,可查阅全站 https://wekup.cn/ 资源更丰富


