基于动态窗口算法的AGV仿真避障
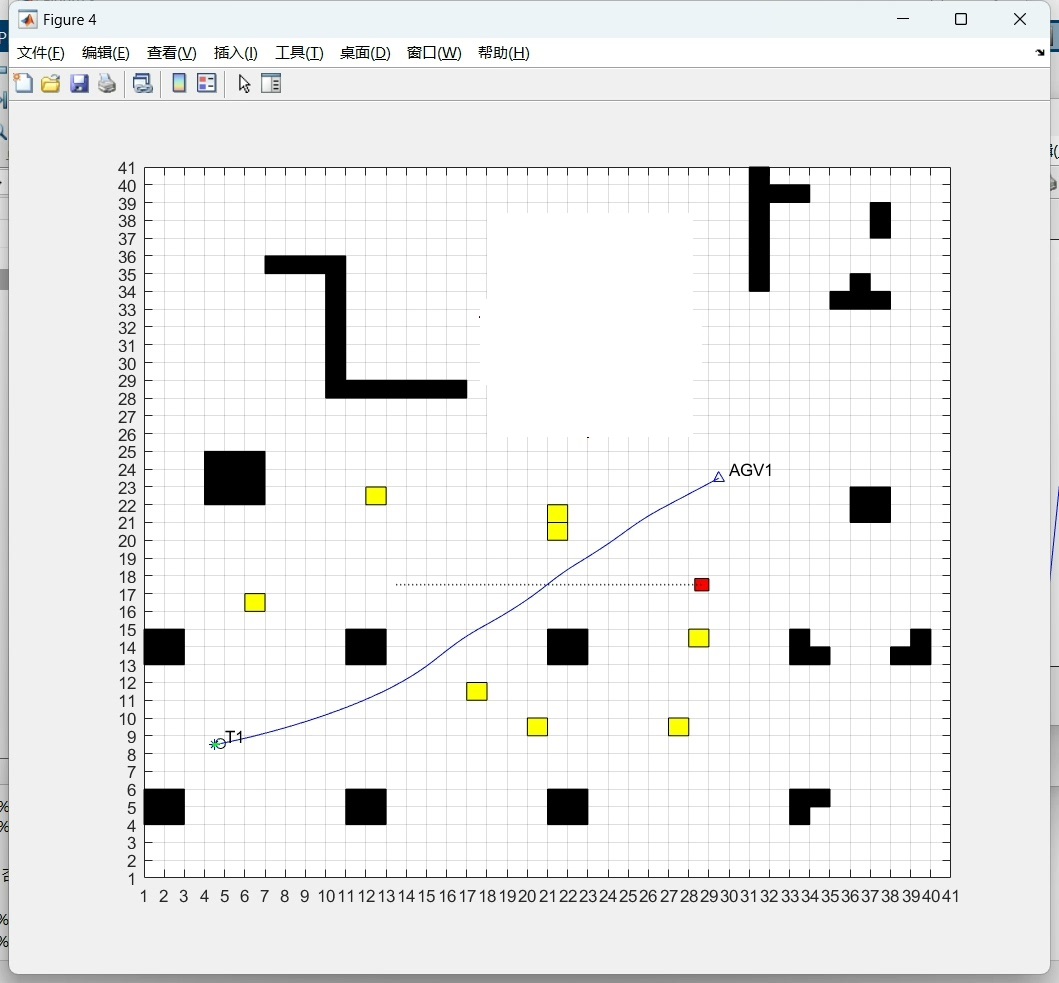
可设置起点目标点,设置地图,设置移动障碍物起始点目标点,未知静态障碍物
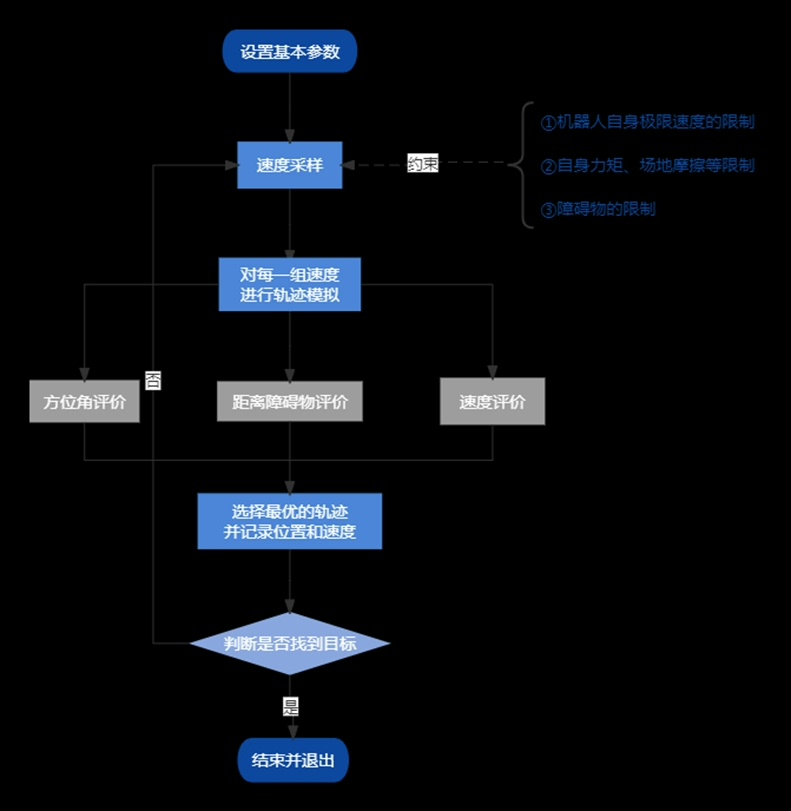
动态窗口方法(DynamicWindowApproach) 是一种可以实现实时避障的局部规划算法,通过将轮式机器人的位置约束转化为速度约束,根据约束进行速度采样,并由一系列的选定速度的动作生成轨迹,结合评价函数选择评分最高的轨迹,实现执行最优速度的问题。
黄色是静态障碍物,红色是可移动障碍物
YID:13150709436275944 最***2
最***2
基于动态窗口算法的AGV仿真避障
可设置起点目标点,设置地图,设置移动障碍物起始点目标点,未知静态障碍物
动态窗口方法(DynamicWindowApproach) 是一种可以实现实时避障的局部规划算法,通过将轮式机器人的位置约束转化为速度约束,根据约束进行速度采样,并由一系列的选定速度的动作生成轨迹,结合评价函数选择评分最高的轨迹,实现执行最优速度的问题。
黄色是静态障碍物,红色是可移动障碍物
YID:13150709436275944最***2
在上方输入框输入您的关键词,然后点击搜索,词语越短越好(2个字最佳)
QQ客服:27699885 微信客服:shujuqudong1 微信客服:shujuqudong6
本站为优质资料,数量有限,如果找不到需求,可查阅全站 https://wekup.cn/ 资源更丰富


