MPU9250 九轴 EKF扩展卡尔曼滤波数据融合算法
短时间内我们相信陀螺仪,长时间内我们可以相信加速度计。
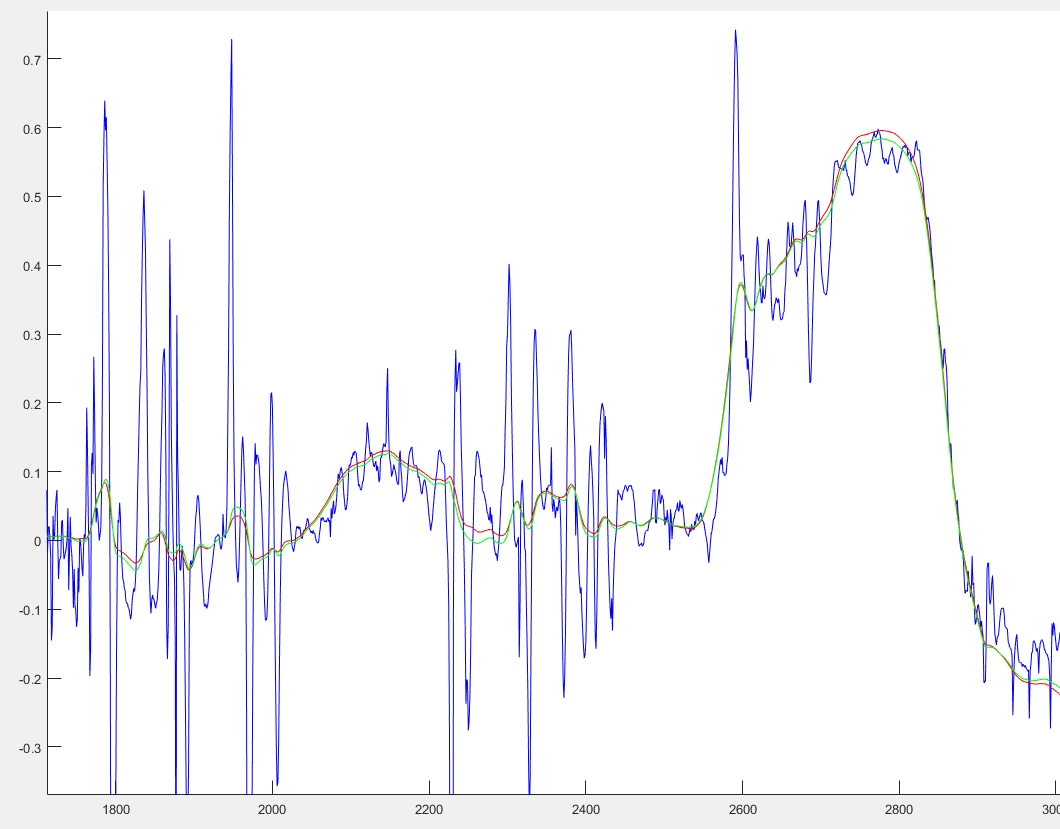
使用扩展卡尔曼滤波(EKF)将数据融合。
选取状态量为四元数和三轴陀螺仪的漂移 控制量为陀螺仪采样值 观测量为 三轴加速度计和磁偏角
YID:14200673825536274 卡尔曼智慧科技
卡尔曼智慧科技
MPU9250 九轴 EKF扩展卡尔曼滤波数据融合算法
短时间内我们相信陀螺仪,长时间内我们可以相信加速度计。
使用扩展卡尔曼滤波(EKF)将数据融合。
选取状态量为四元数和三轴陀螺仪的漂移 控制量为陀螺仪采样值 观测量为 三轴加速度计和磁偏角
YID:14200673825536274卡尔曼智慧科技
在上方输入框输入您的关键词,然后点击搜索,词语越短越好(2个字最佳)
QQ客服:27699885 微信客服:shujuqudong1 微信客服:shujuqudong6
本站为优质资料,数量有限,如果找不到需求,可查阅全站 https://wekup.cn/ 资源更丰富


