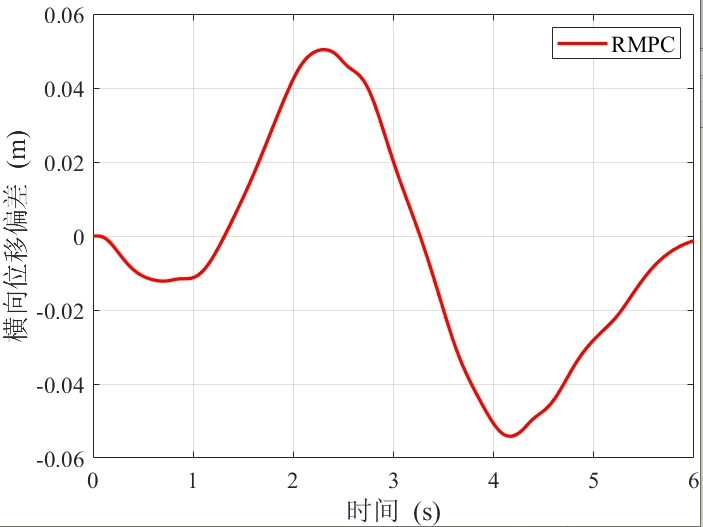
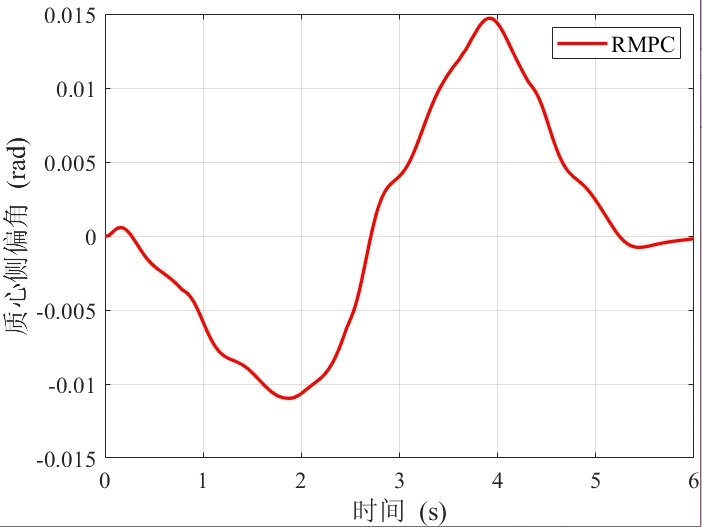
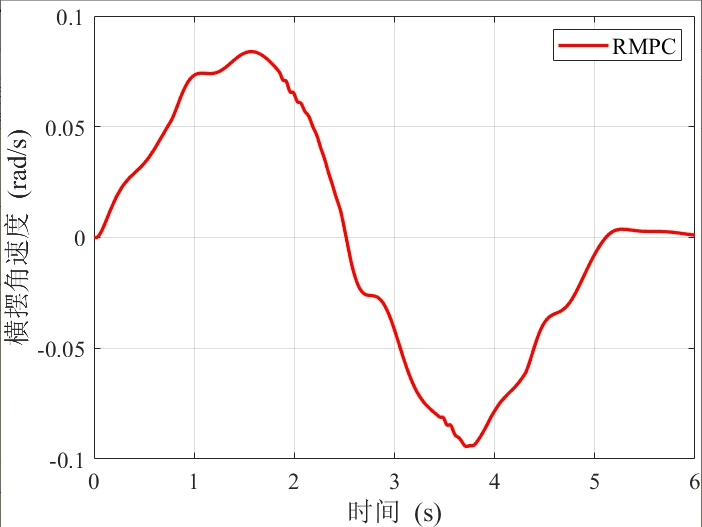
线性参变(LPV)+鲁棒模型预测控制(RMPC)+路径跟踪(PTC),目前能实现20-25m/s的变速单移线和10-15m/s的变速双移线。
考虑速度和侧偏刚度变化,基于二自由度模型和LMI设计鲁棒模型预测控制器。
上层考虑状态约束,输入约束进行控制率在线求解,计算得到前轮转角和附加横摆力矩,下层通过最优化算法求出四轮转矩。
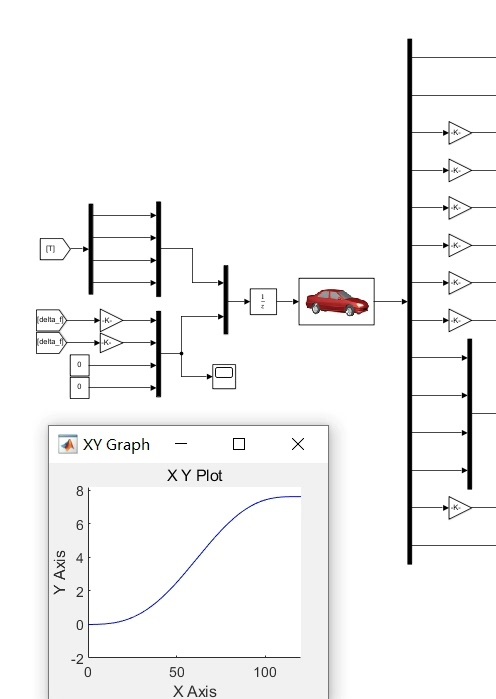
算法采用simulink的sfunction进行搭建,和carsim8.02进行联合仿真,包含出图m文件和简单的说明文档。
本套文件内含一个主要的mdl文件,一个出图m文件,一个说明文档以及carsim8.02的cpar文件。
MATLAB2020a以上版本和carsim8.02版本
YID:67298728654781443 齐国散打娃娃
齐国散打娃娃