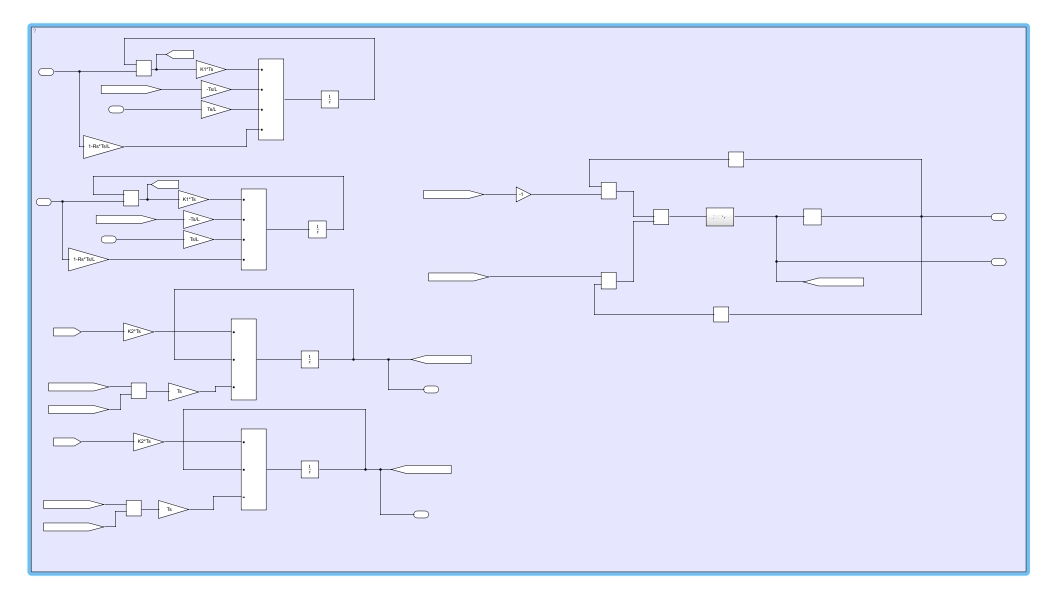
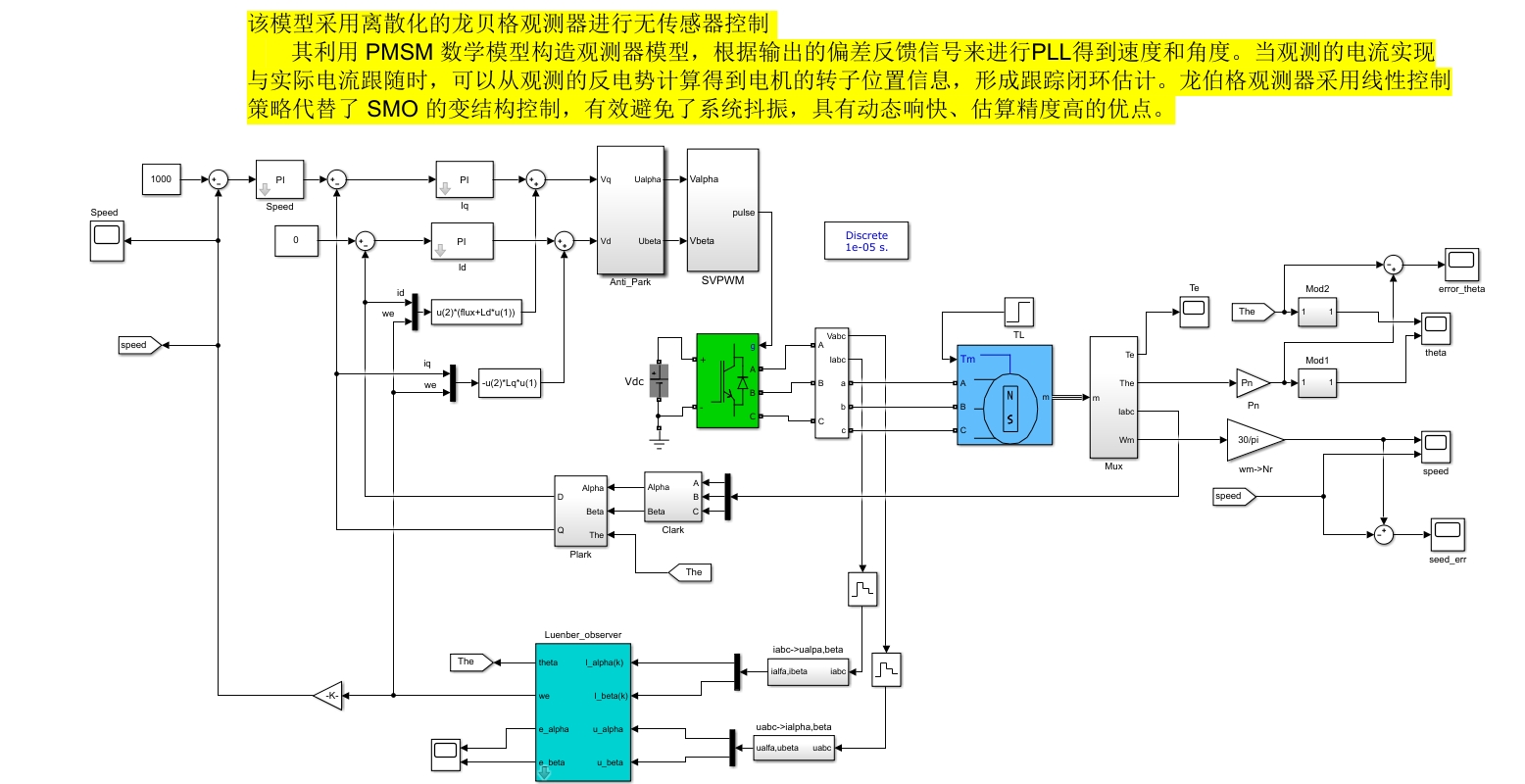
该模型采用离散化的龙贝格观测器进行无传感器控制
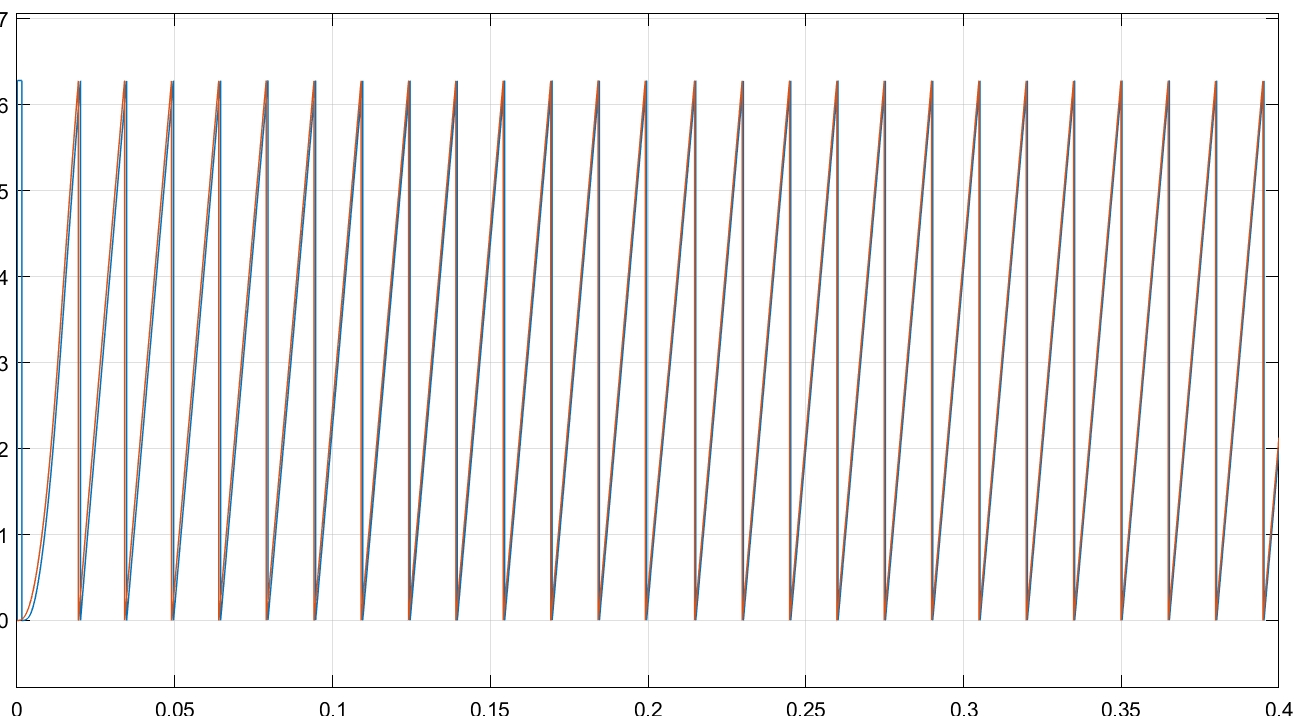
其利用 PMSM 数学模型构造观测器模型,根据输出的偏差反馈信号来进行PLL得到速度和角度。
当观测的电流实现与实际电流跟随时,可以从观测的反电势计算得到电机的转子位置信息,形成跟踪闭环估计。
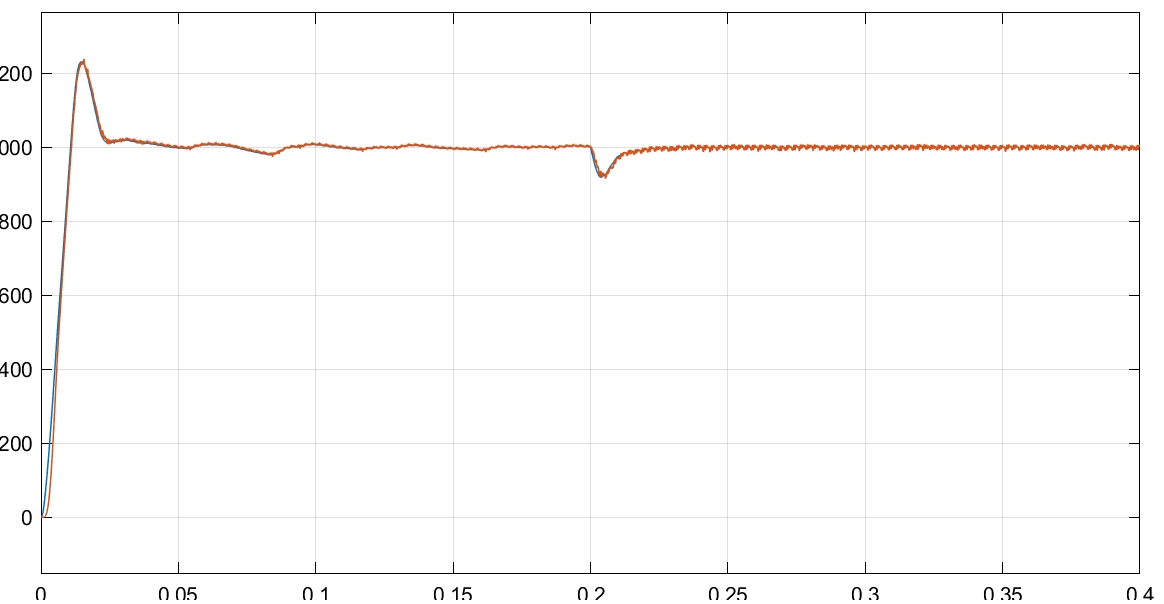
龙伯格观测器采用线性控制策略代替了 SMO 的变结构控制,有效避免了系统抖振,具有动态响快、估算精度高的优点。
YID:86188671040954591 Keepmoving
Keepmoving

该模型采用离散化的龙贝格观测器进行无传感器控制
其利用 PMSM 数学模型构造观测器模型,根据输出的偏差反馈信号来进行PLL得到速度和角度。
当观测的电流实现与实际电流跟随时,可以从观测的反电势计算得到电机的转子位置信息,形成跟踪闭环估计。
龙伯格观测器采用线性控制策略代替了 SMO 的变结构控制,有效避免了系统抖振,具有动态响快、估算精度高的优点。
YID:86188671040954591Keepmoving
在上方输入框输入您的关键词,然后点击搜索,词语越短越好(2个字最佳)
QQ客服:27699885 微信客服:shujuqudong1 微信客服:shujuqudong6
本站为优质资料,数量有限,如果找不到需求,可查阅全站 https://wekup.cn/ 资源更丰富


