carsim与simulink联合仿真(3)——差动驱动
两轮独立驱动电动汽车控制策略。
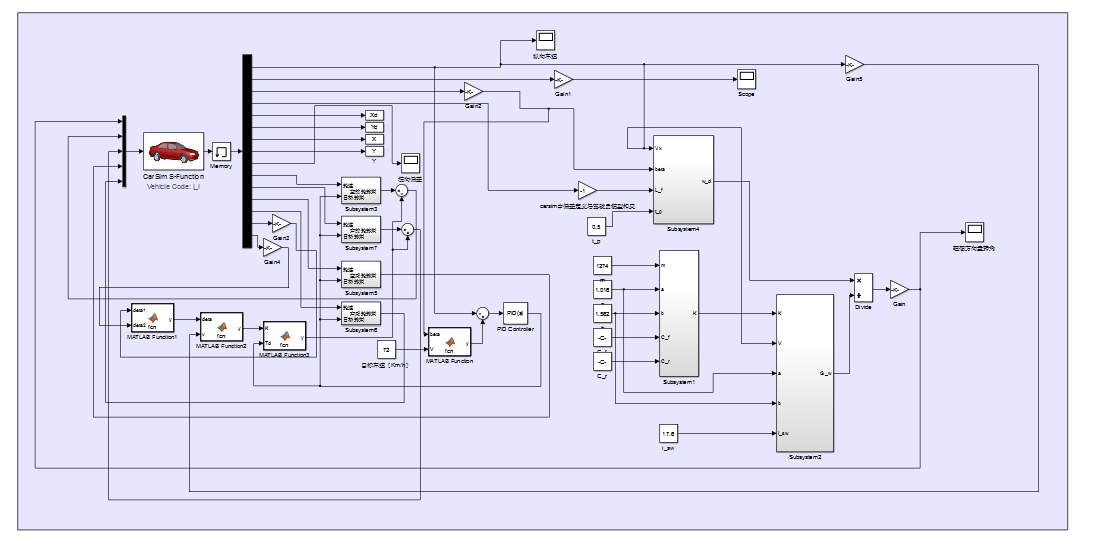
分为低速和高速两种策略优化分配驱动力矩,低速基于阿克曼转向的差速控制,高速的分上下两层控制器,上层计算附加扭矩,下层进行分配。
路径跟踪,力矩分配,高低速双策略。
carsim和Simulink联合仿真,包含建模说明书。
有carsim的cpar文件导入即可使用
有simulink的mdl模型文件支持自己修改
有模型说明文件
包含高速和低速两种工况
YID:9480666867271221 多不多啦米
多不多啦米

carsim与simulink联合仿真(3)——差动驱动
两轮独立驱动电动汽车控制策略。
分为低速和高速两种策略优化分配驱动力矩,低速基于阿克曼转向的差速控制,高速的分上下两层控制器,上层计算附加扭矩,下层进行分配。
路径跟踪,力矩分配,高低速双策略。
carsim和Simulink联合仿真,包含建模说明书。
有carsim的cpar文件导入即可使用
有simulink的mdl模型文件支持自己修改
有模型说明文件
包含高速和低速两种工况
YID:9480666867271221多不多啦米
在上方输入框输入您的关键词,然后点击搜索,词语越短越好(2个字最佳)
QQ客服:27699885 微信客服:shujuqudong1 微信客服:shujuqudong6
本站为优质资料,数量有限,如果找不到需求,可查阅全站 https://wekup.cn/ 资源更丰富


