六自由度机械臂建模仿真(matlab程序),有控制面板,代码可流畅运行
1、机器人运动学正逆解、动力学建模仿真与轨迹规划,雅克比矩阵求解
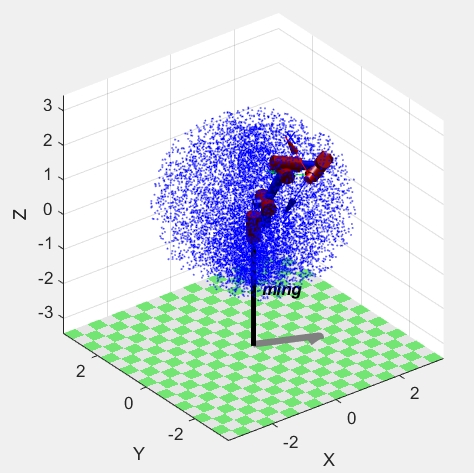
2、蒙特卡洛采样画出末端执行器工作空间
3、基于时间最优的改进粒子群优化算法机械臂轨迹规划设计
YID:9218678872030717 天河小鱼
天河小鱼




六自由度机械臂建模仿真(matlab程序),有控制面板,代码可流畅运行
1、机器人运动学正逆解、动力学建模仿真与轨迹规划,雅克比矩阵求解
2、蒙特卡洛采样画出末端执行器工作空间
3、基于时间最优的改进粒子群优化算法机械臂轨迹规划设计
YID:9218678872030717天河小鱼
在上方输入框输入您的关键词,然后点击搜索,词语越短越好(2个字最佳)
QQ客服:27699885 微信客服:shujuqudong1 微信客服:shujuqudong6
本站为优质资料,数量有限,如果找不到需求,可查阅全站 https://wekup.cn/ 资源更丰富


