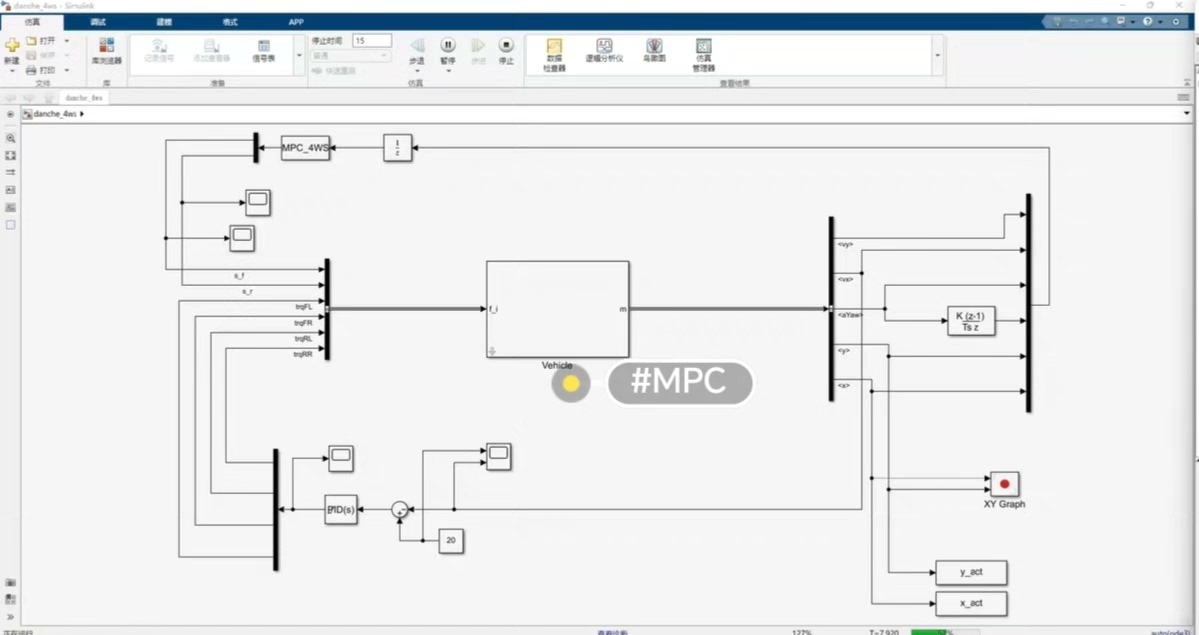
四轮转向汽车模型预测控制(MPC)路径跟踪
Simulink-simscape仿真,无需Carsim。
MPC基于车辆动力学模型设计,纵向PID控制
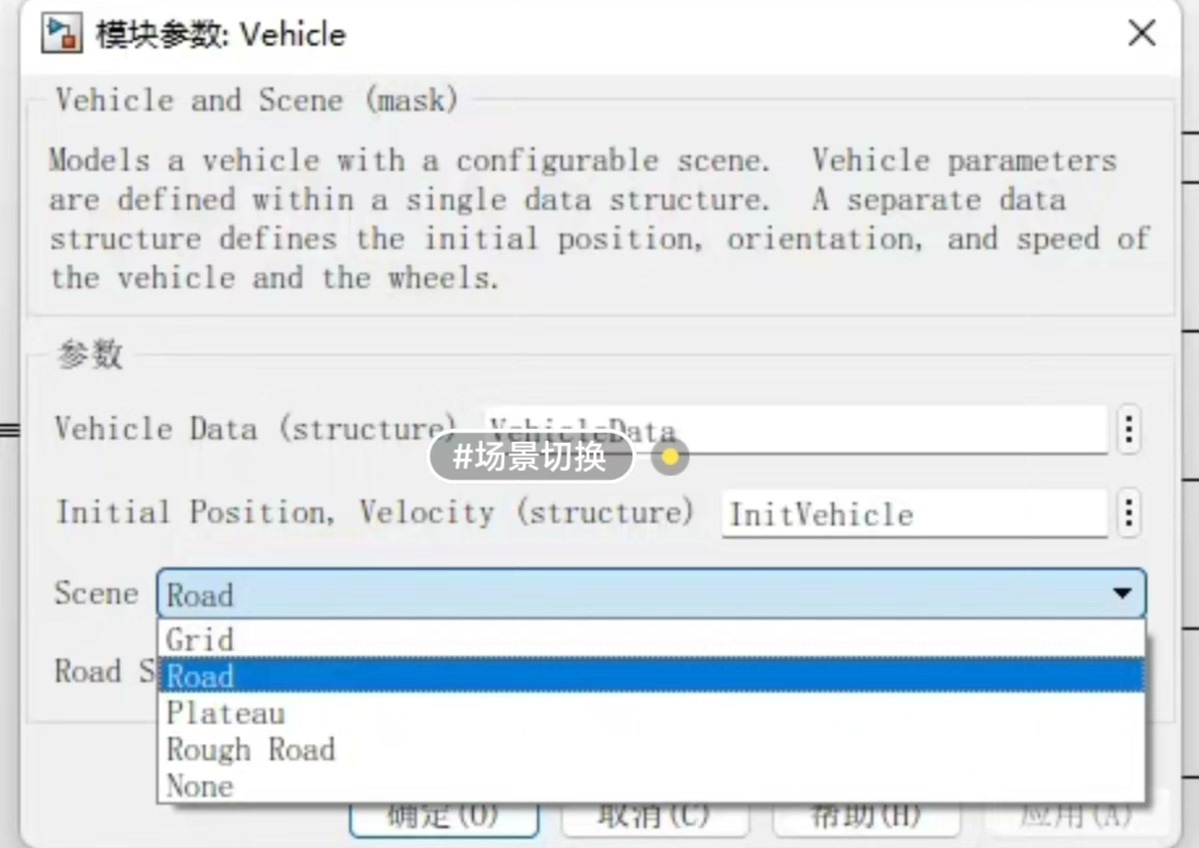
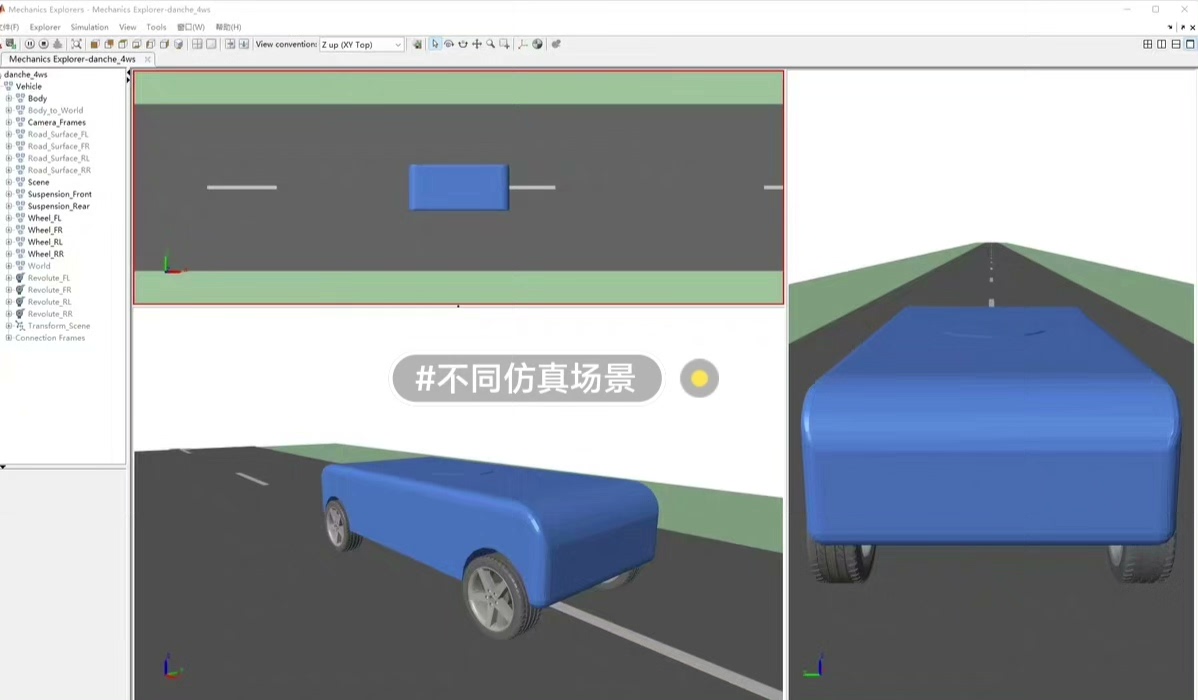
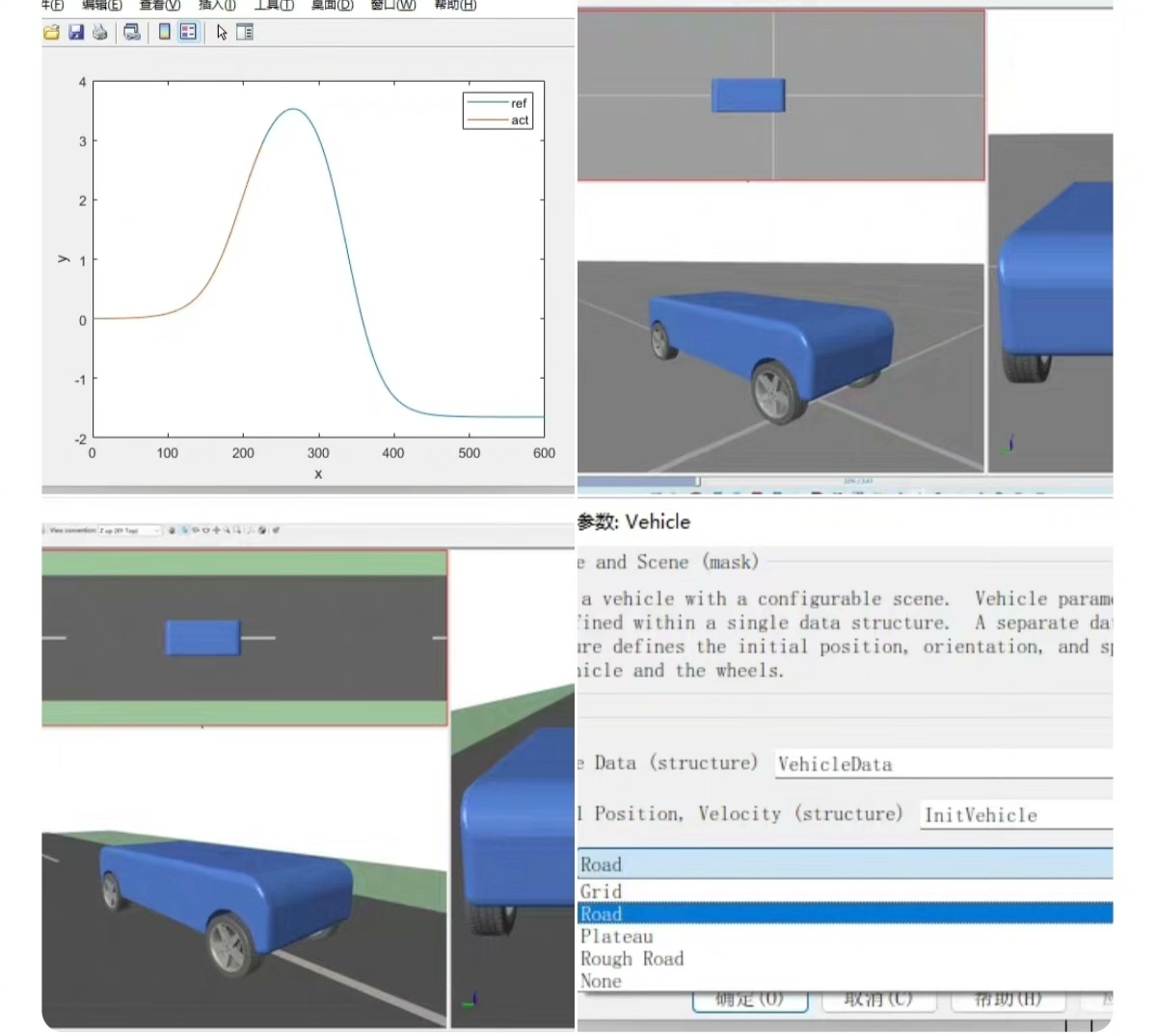
该模型支持平坦路面,颠簸路面切换,外形变化,魔术公式轮胎模型。
支持MATLAB 2022a及以上版本哦
YID:8635787229421762 ICAR汽车设计
ICAR汽车设计
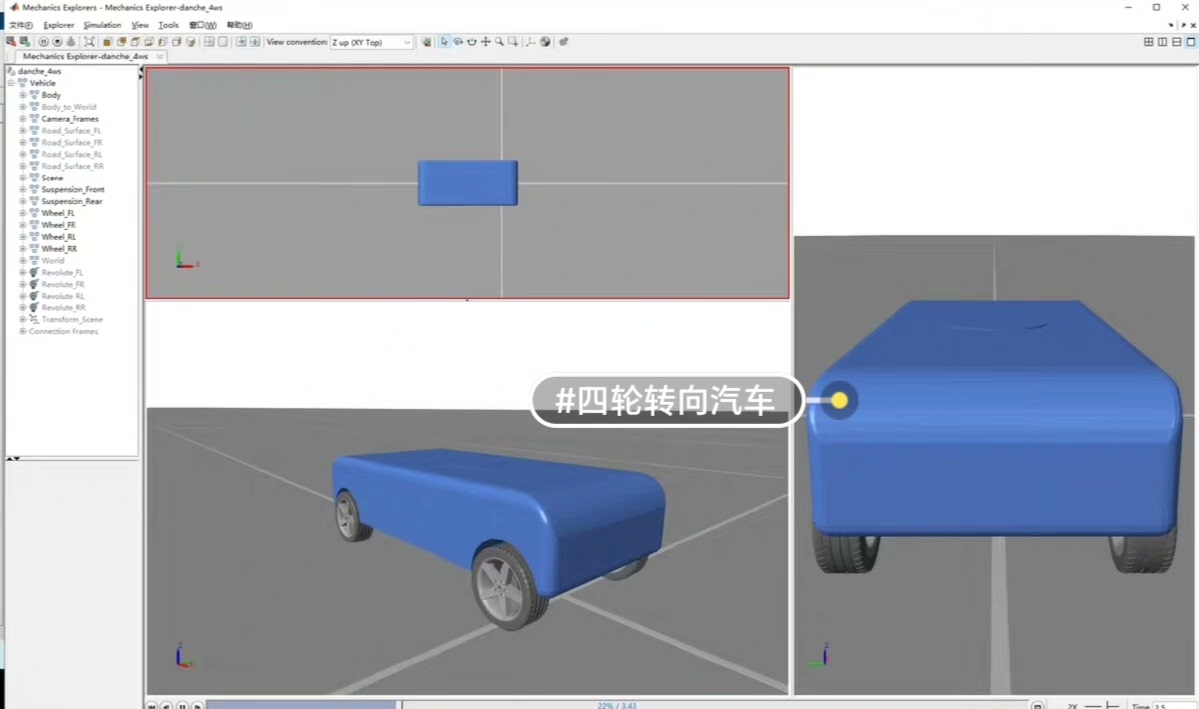
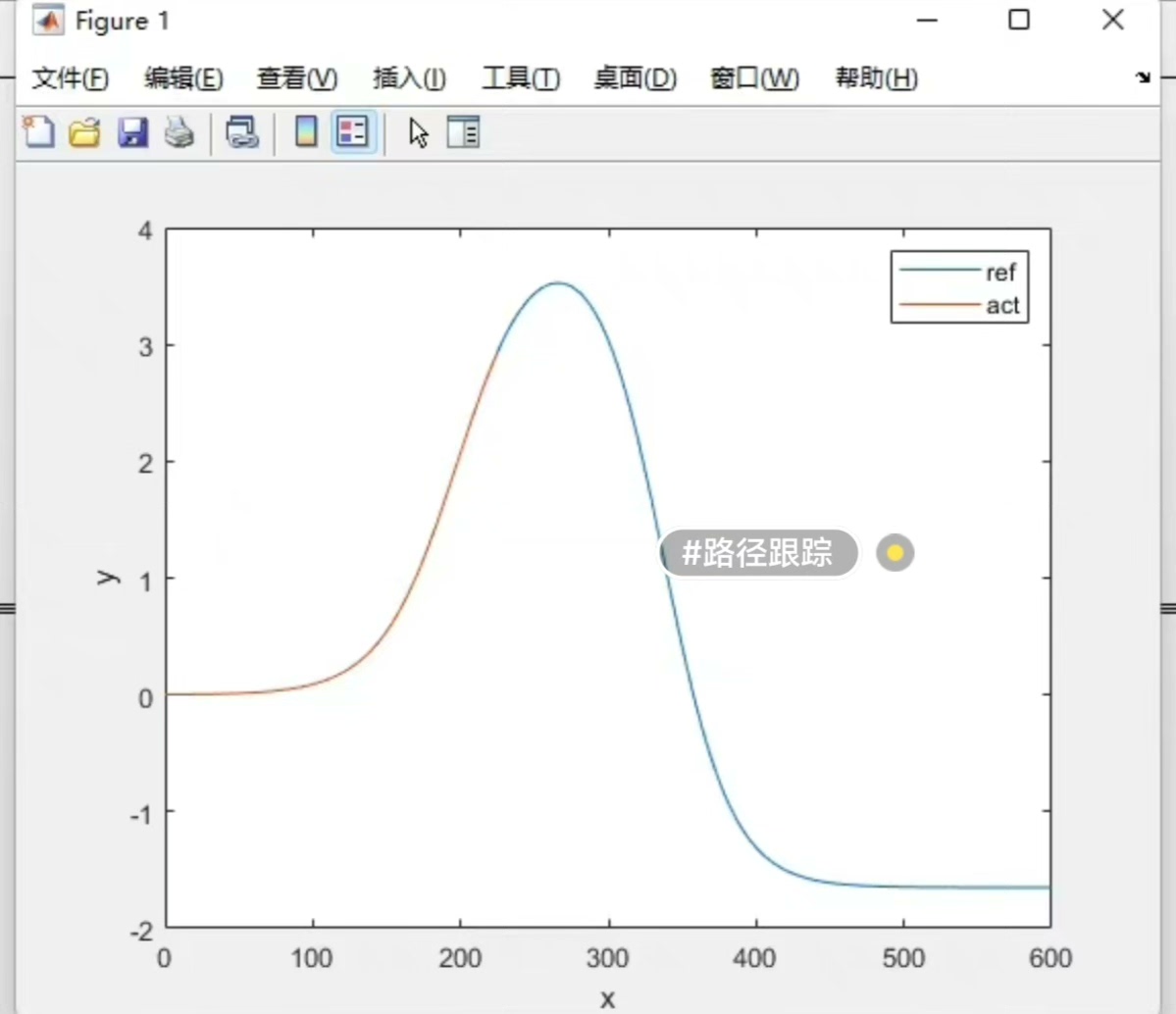
四轮转向汽车模型预测控制(MPC)路径跟踪
Simulink-simscape仿真,无需Carsim。
MPC基于车辆动力学模型设计,纵向PID控制
该模型支持平坦路面,颠簸路面切换,外形变化,魔术公式轮胎模型。
支持MATLAB 2022a及以上版本哦
YID:8635787229421762ICAR汽车设计
在上方输入框输入您的关键词,然后点击搜索,词语越短越好(2个字最佳)
QQ客服:27699885 微信客服:shujuqudong1 微信客服:shujuqudong6
本站为优质资料,数量有限,如果找不到需求,可查阅全站 https://wekup.cn/ 资源更丰富


