基于强化学习 DDPG 算法实现的acc 自适应巡航控制器设计
配有说明文档
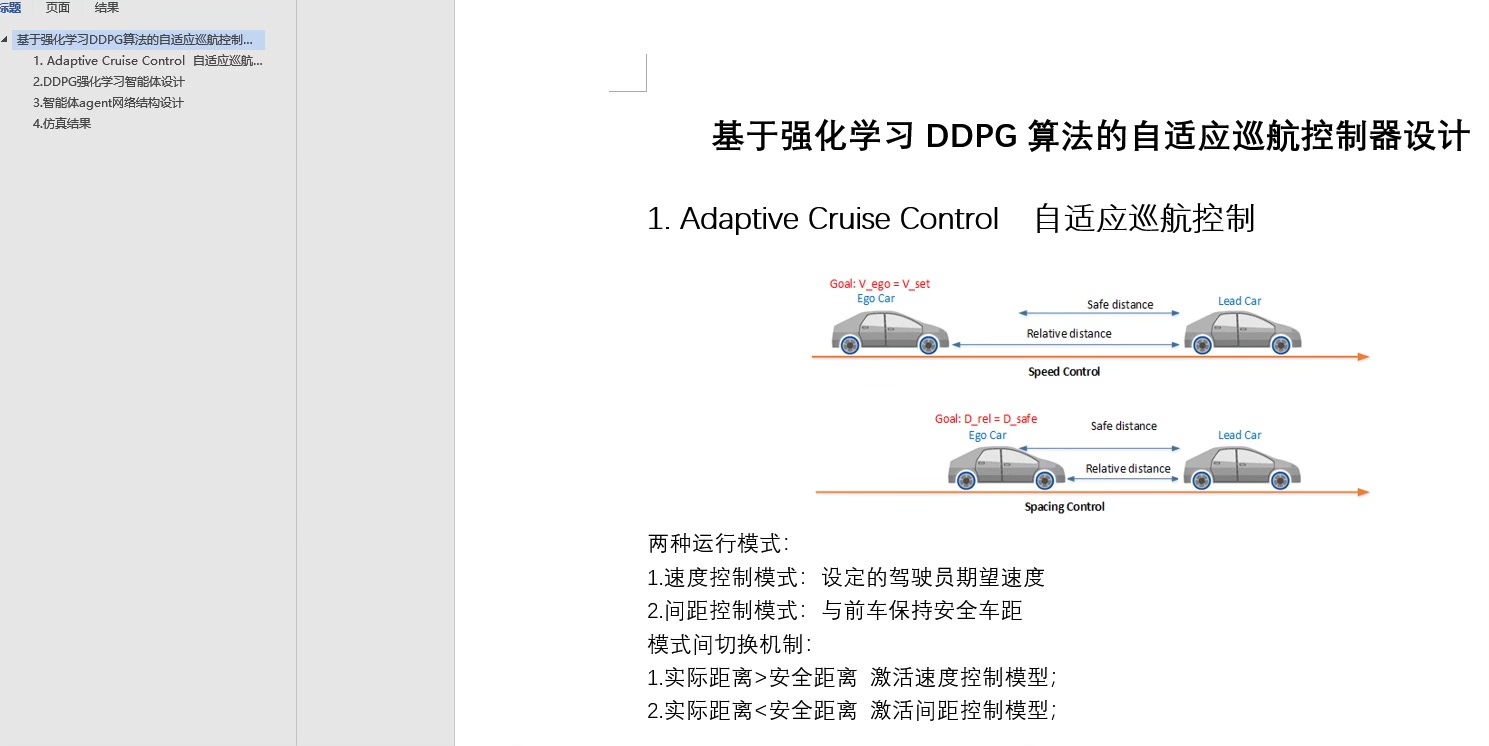
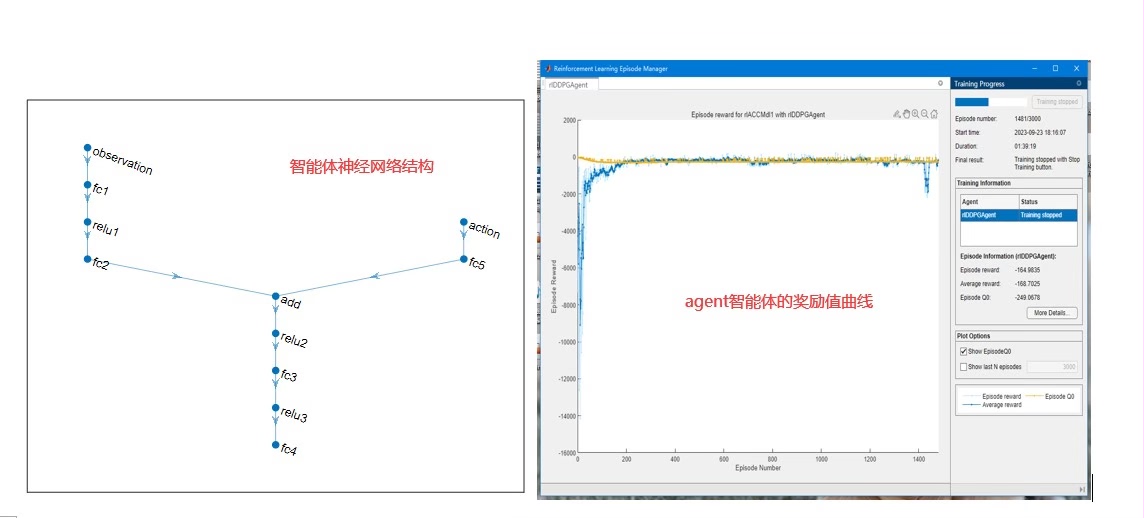
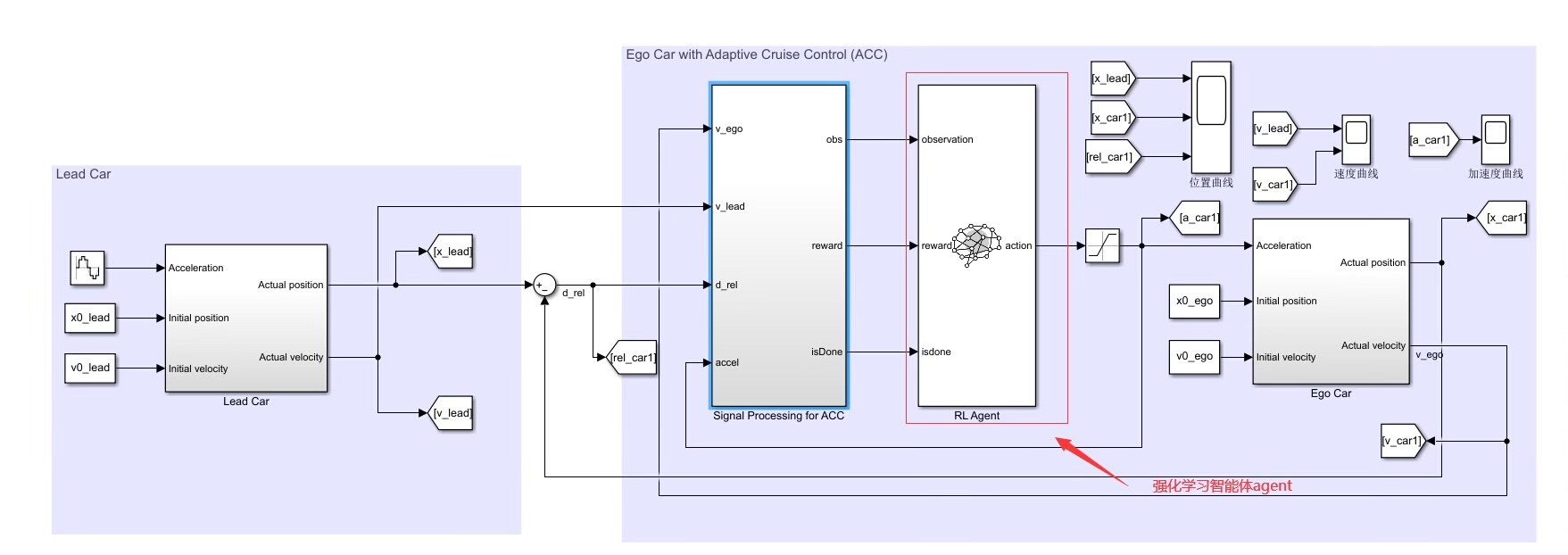
基于simulink 中的强化学习工具箱,设计agent 的奖励函数,动作空间,状态空间,训练终止条件
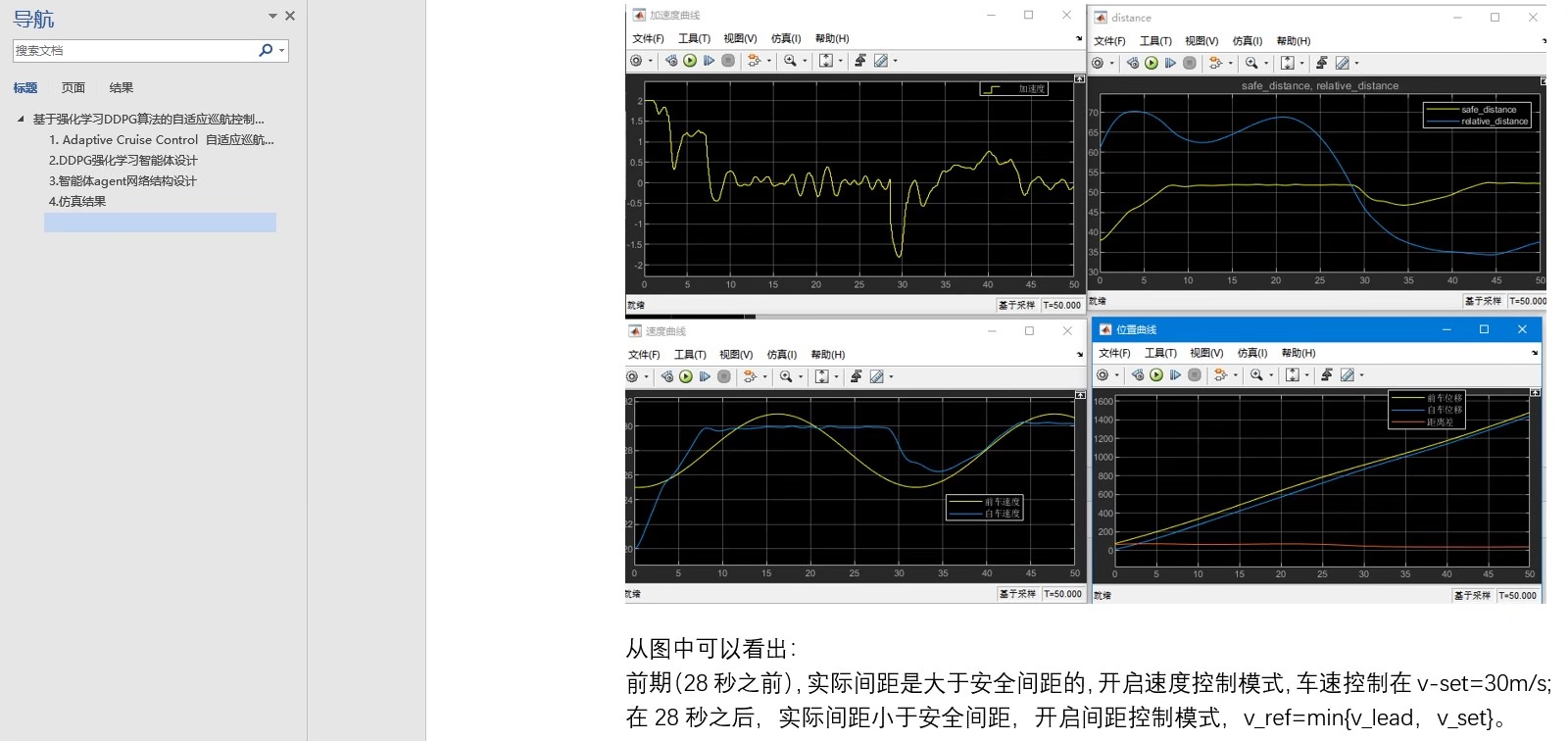
设置领航车的速度和位移曲线,然后自车的加速度基于 acc 逻辑用ddpg agent 来控制。
模型比较简单,适用于初学强化学习算法的入门资源,可改写成强化学习的车辆队列协同控制。
YID:1220740453377470 吕~小布
吕~小布
基于强化学习 DDPG 算法实现的acc 自适应巡航控制器设计
配有说明文档
基于simulink 中的强化学习工具箱,设计agent 的奖励函数,动作空间,状态空间,训练终止条件
设置领航车的速度和位移曲线,然后自车的加速度基于 acc 逻辑用ddpg agent 来控制。
模型比较简单,适用于初学强化学习算法的入门资源,可改写成强化学习的车辆队列协同控制。
YID:1220740453377470吕~小布
在上方输入框输入您的关键词,然后点击搜索,词语越短越好(2个字最佳)
QQ客服:27699885 微信客服:shujuqudong1 微信客服:shujuqudong6
本站为优质资料,数量有限,如果找不到需求,可查阅全站 https://wekup.cn/ 资源更丰富


