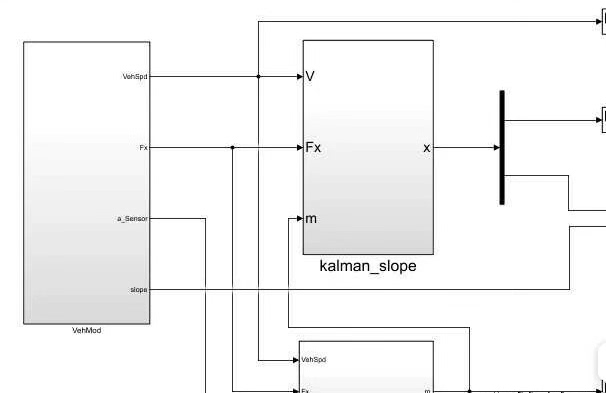
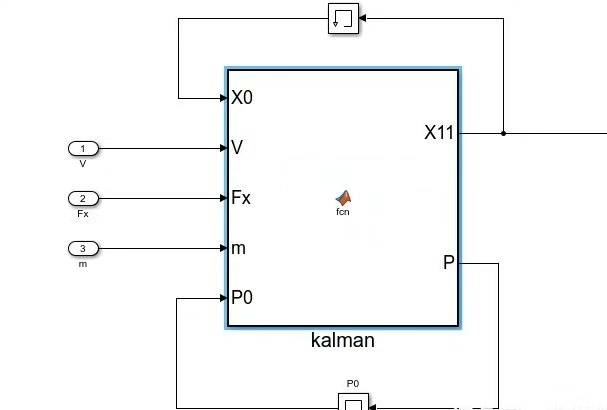
1,扩展卡尔曼滤波。
道路坡度估计算法,使用Simulink模型搭建,已经在实际道路上测试使用。
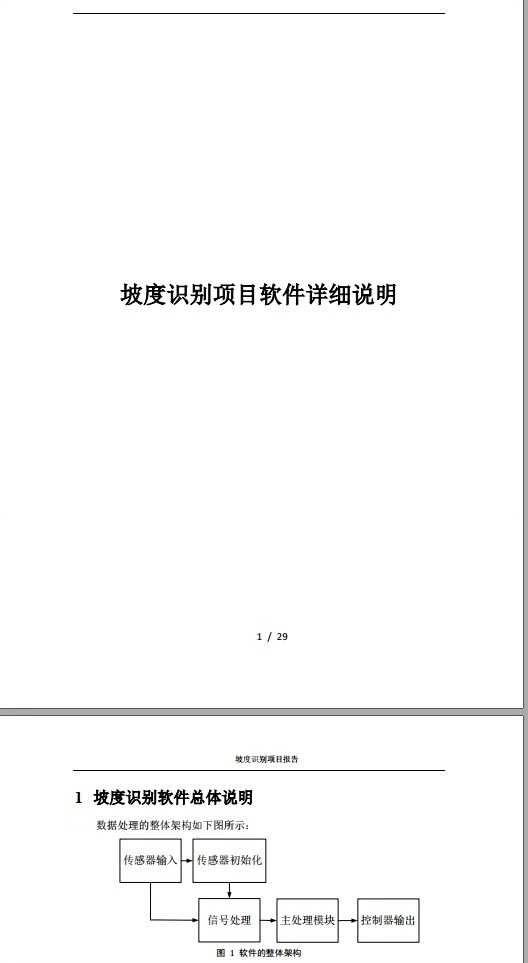
主要程序执行流程:
1) 获取陀螺仪和加速度采集的实时动态信息
2) 初始化用来校正传感器
3) 通过预处理对信号进行滤波,消除大部分错误和失真的信号
4) 主处理动态调整加权因数、利用角速度校正加速度等方法,得到最优的
坡度估计
5) 通过 CAN 总线将估计的坡度信号传递给整车其他电控单元
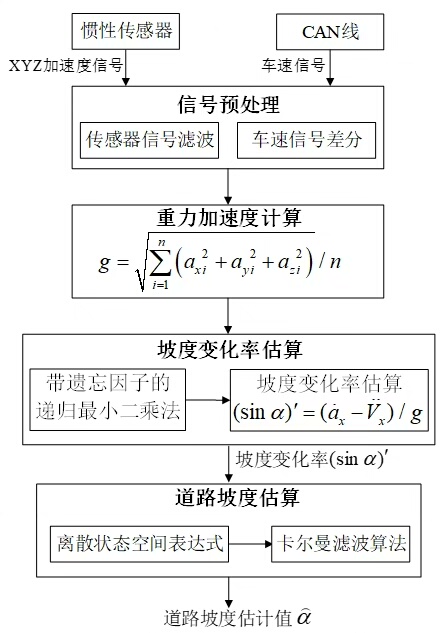
该道路坡度估计方法融合传感器和车速信号的和系统,包括以下步骤:一、信号预处理,包括对惯性传感器获得的原始加速度信号的低通滤波和从CAN线获得的车速信号的差分;二、计算重力加速度,利用惯性传感器预处理后的XYZ加速度信号计算当地重力加速度;三、利用带遗忘因子的递归最小二乘法估算道路坡度变化率,滤除大量噪声并且保证算法的实时性;四、利用卡尔曼滤波算法估算道路坡度,将传感器信号和车速信号进行数据融合,提高道路坡度估算的精度。
YID:61108727900368305 汽车姿势加油站
汽车姿势加油站