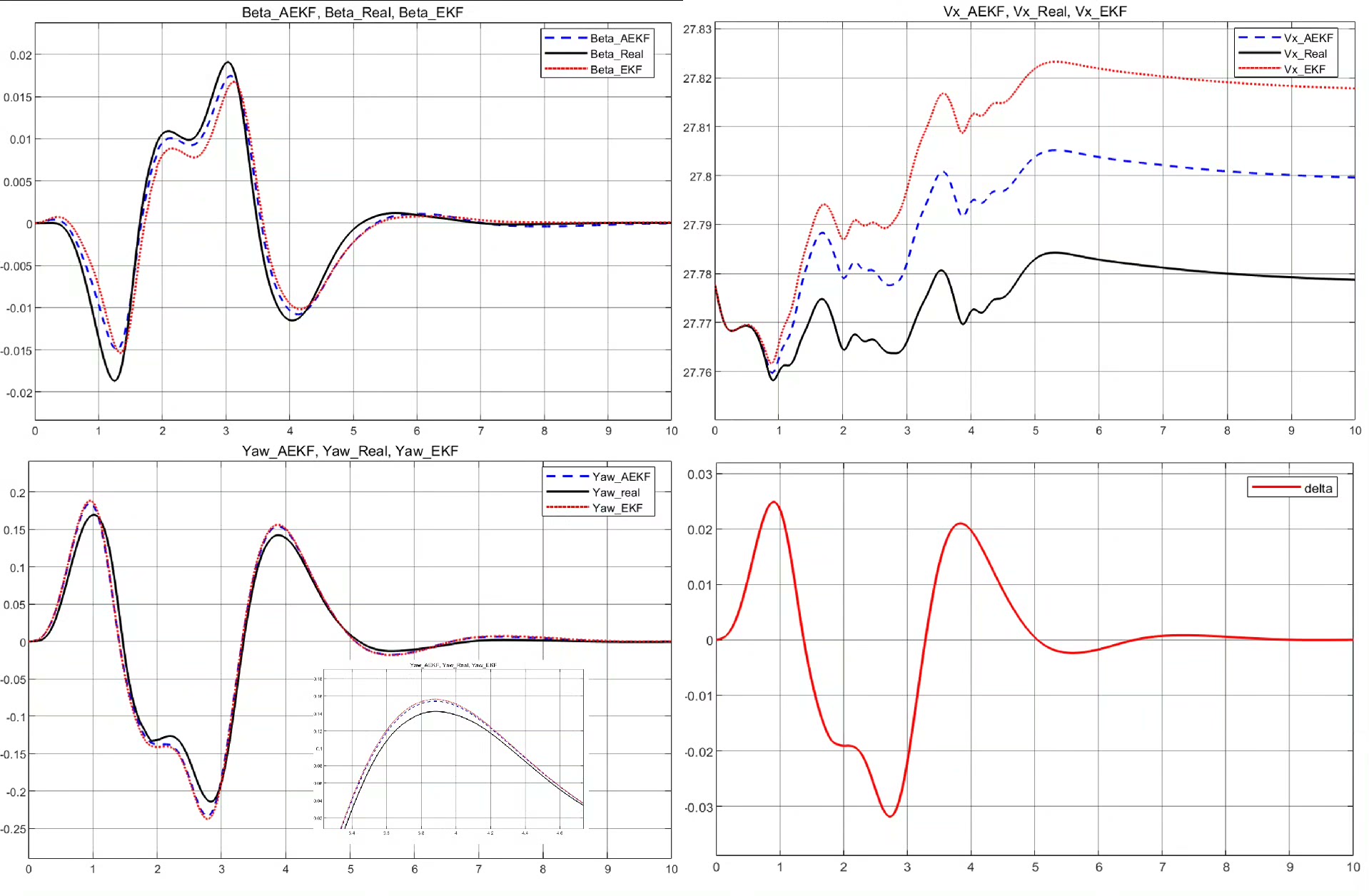
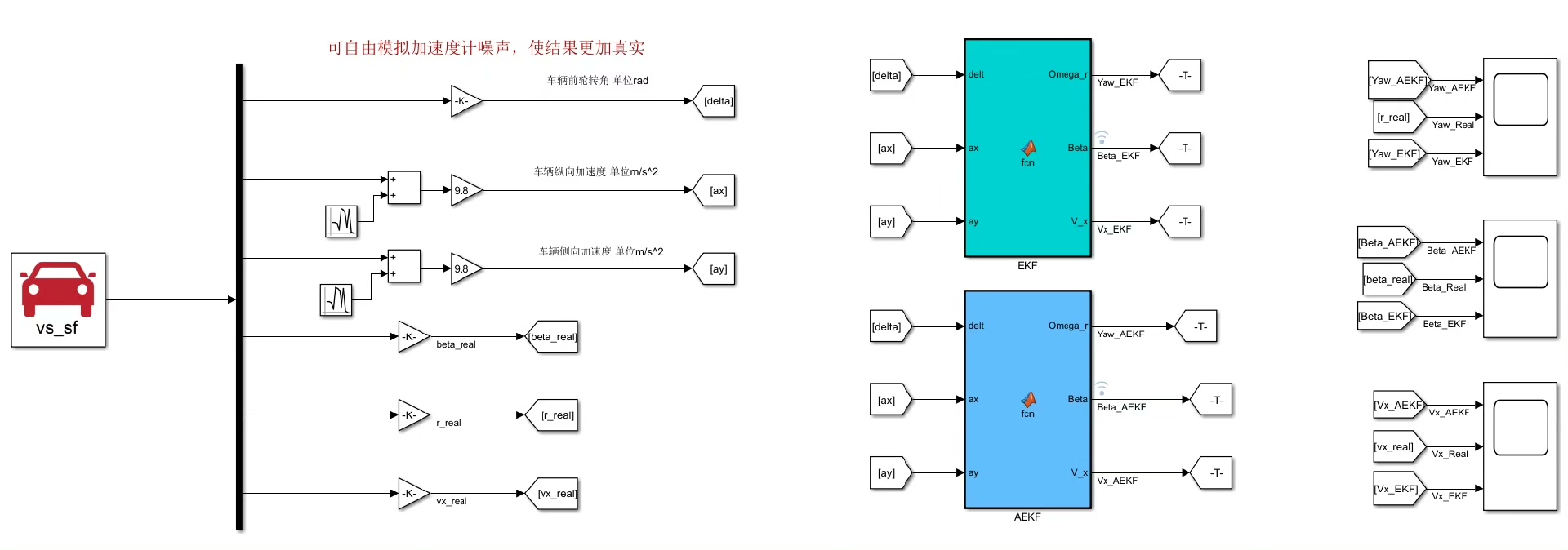
车辆状态估计模型EKF/AEKF 基于Carsim和simulink联合仿真,在建立车辆三自由度模型(自行车模型加纵向)的基础上,分别使用EKF和AEKF算法对纵向车速,横摆角速度,质心侧偏角进行估计,并进行结果对比。
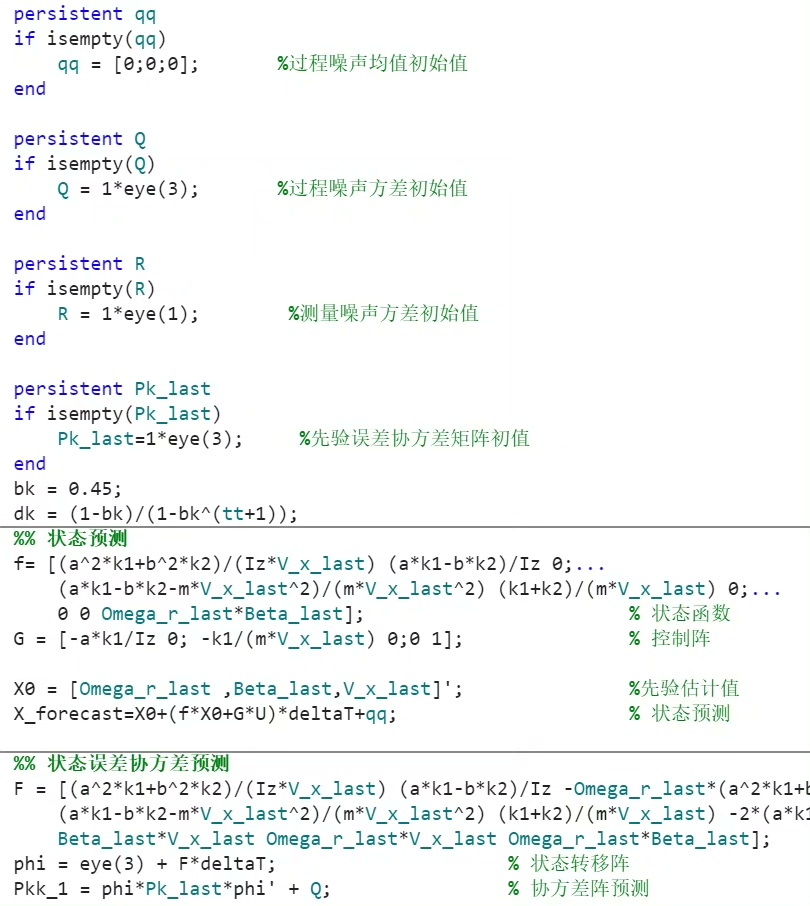
自适应扩展卡尔曼滤波采用sage-husa滤波实现噪声均值和方差的自适应策略,模型控制变量为[ax,δ],观测变量为ay。
使用Matlab function,通过定义静态变量编写,方便学习或修改为其他待估模型的扩展卡尔曼滤波/自适应扩展卡尔曼滤波估计器。
文档详实
YID:4315752649583870 泰若星刻苦的芥兰
泰若星刻苦的芥兰