最优控制和轨迹规划学习笔记
包含多个实际案例
倒立摆上翻控制
满足车辆运动学约束的路径规划
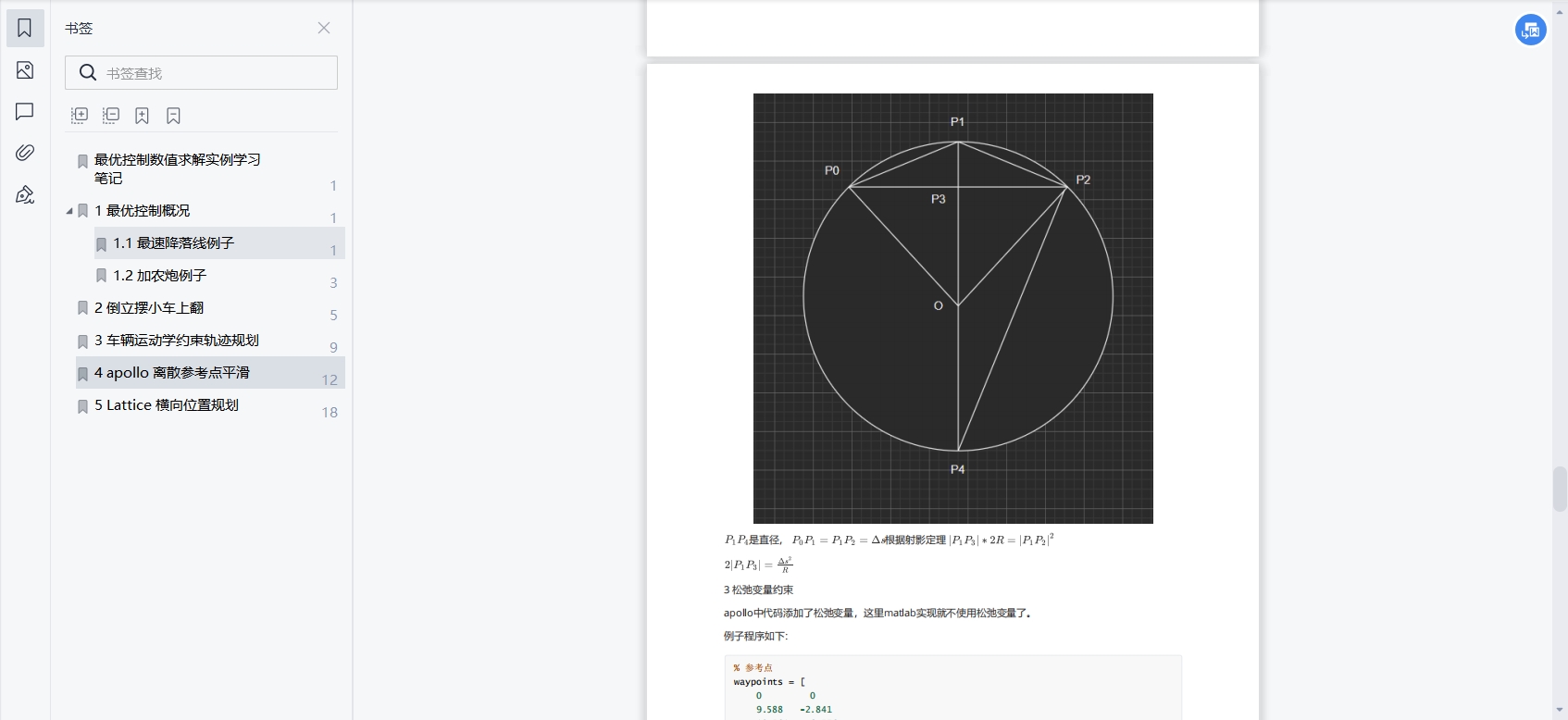
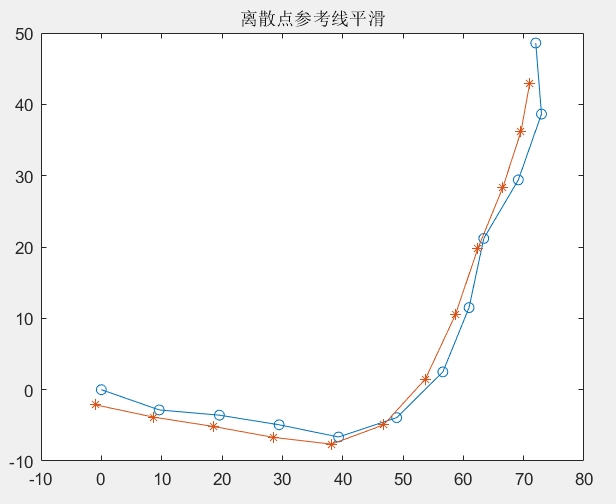
离散点参考线优化
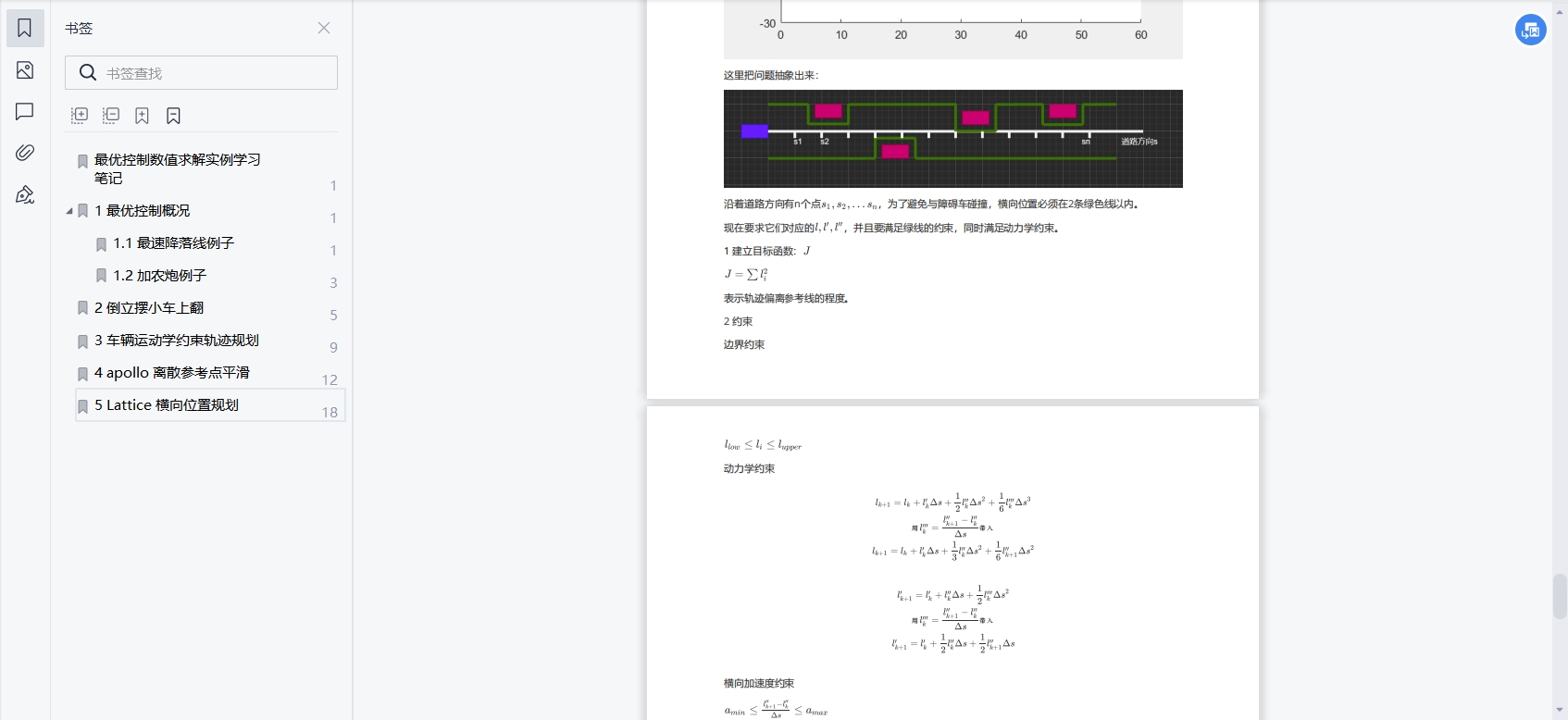
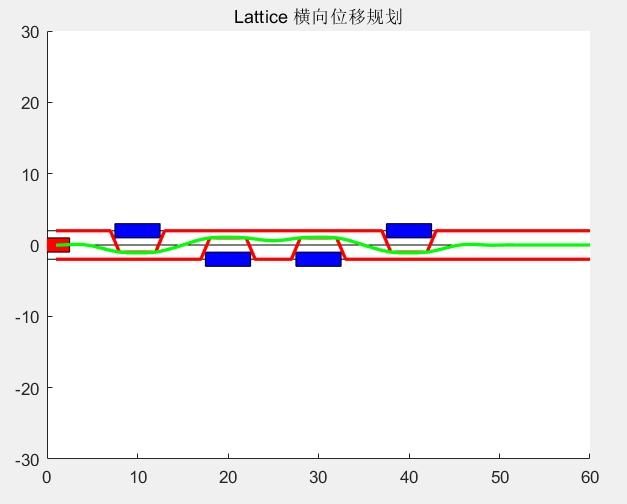
lattice横向距离规划
YID:5745658004330616 autorobot
autorobot
最优控制和轨迹规划学习笔记
包含多个实际案例
倒立摆上翻控制
满足车辆运动学约束的路径规划
离散点参考线优化
lattice横向距离规划
YID:5745658004330616autorobot
在上方输入框输入您的关键词,然后点击搜索,词语越短越好(2个字最佳)
QQ客服:27699885 微信客服:shujuqudong1 微信客服:shujuqudong6
本站为优质资料,数量有限,如果找不到需求,可查阅全站 https://wekup.cn/ 资源更丰富


