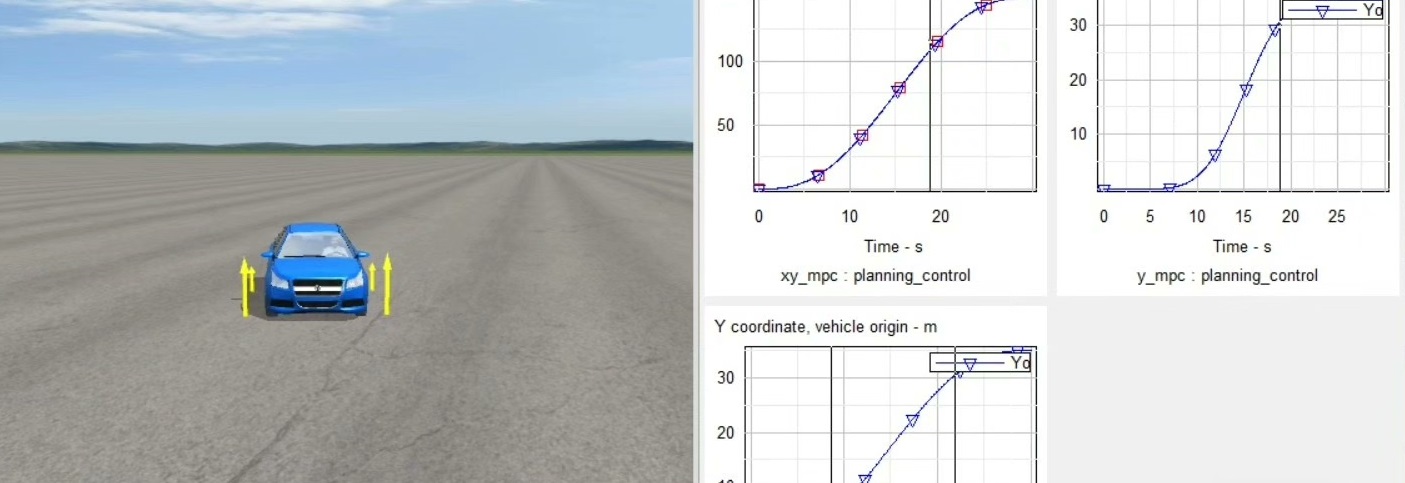
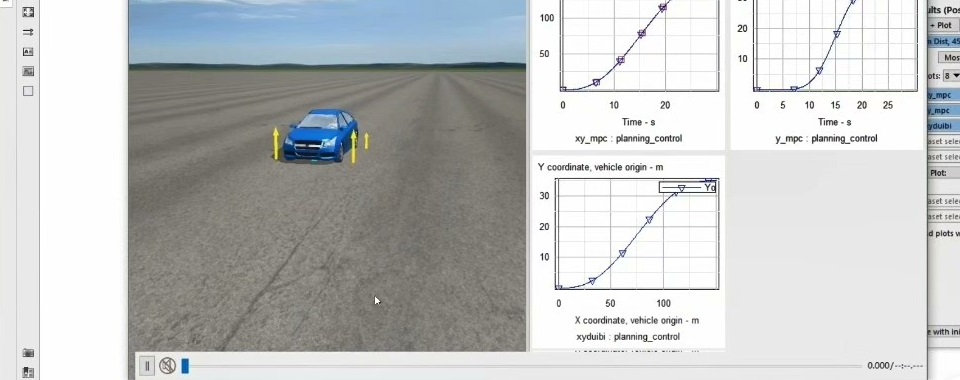
自动驾驶横纵向控制,纵向采用pid控制,横向采用mpc控制,根据的是车辆二自由度车辆动力学模型,得到各矩阵之后在S函数里面进行编写,纵向参考百度Apollo纵向双环PID控制算法,横向参考百度Apollo中mpc控制算法编写,规划的轨迹为五次多项式函数形式。
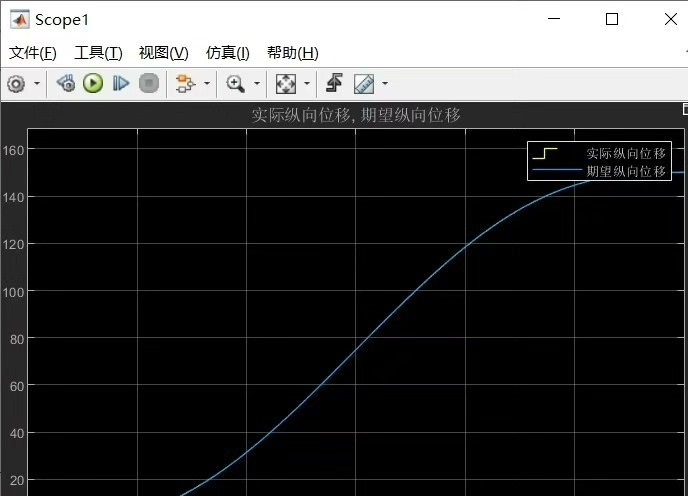
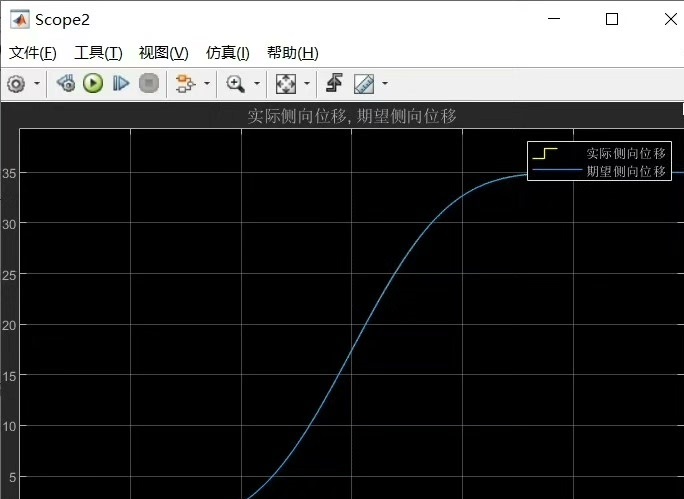
控制效果:车辆侧向位移和纵向位移跟踪效果很好,纵向车速跟随也较好,但有一定的误差。
Matlab/Simulink版本:2021a
Carsim版本:2019.0
YID:4756768963751970 小小科技
小小科技

自动驾驶横纵向控制,纵向采用pid控制,横向采用mpc控制,根据的是车辆二自由度车辆动力学模型,得到各矩阵之后在S函数里面进行编写,纵向参考百度Apollo纵向双环PID控制算法,横向参考百度Apollo中mpc控制算法编写,规划的轨迹为五次多项式函数形式。
控制效果:车辆侧向位移和纵向位移跟踪效果很好,纵向车速跟随也较好,但有一定的误差。
Matlab/Simulink版本:2021a
Carsim版本:2019.0
YID:4756768963751970小小科技
在上方输入框输入您的关键词,然后点击搜索,词语越短越好(2个字最佳)
QQ客服:27699885 微信客服:shujuqudong1 微信客服:shujuqudong6
本站为优质资料,数量有限,如果找不到需求,可查阅全站 https://wekup.cn/ 资源更丰富


