MATLAB仿真UR5机器人simulink simscape 自制建模
正向运动学,逆向运动学
关节空间轨迹规划 五次多项式轨迹规划
笛卡尔空间轨迹规划 直线插补
还包含机器人工具箱建立的模型对比
YID:73240667406909214 爱小马的海盐大傻
爱小马的海盐大傻
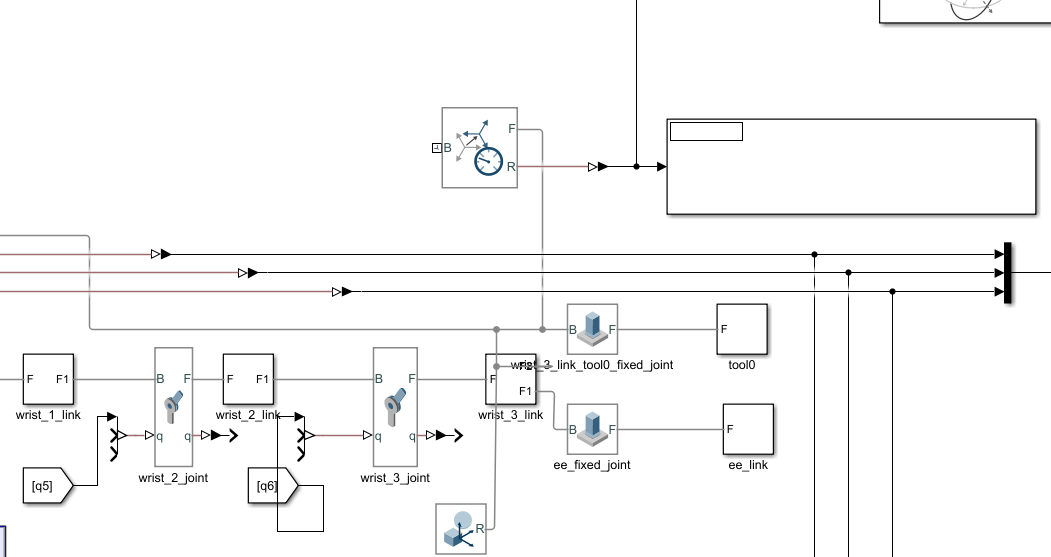


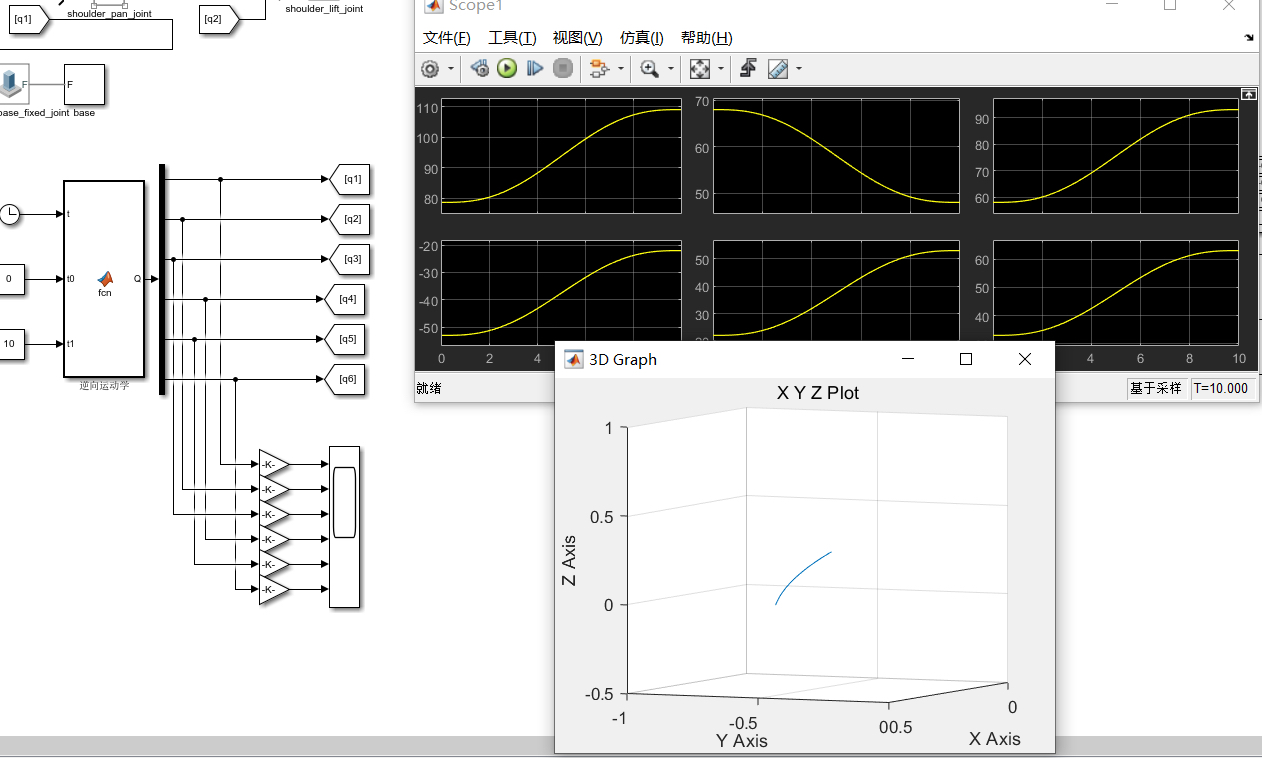

MATLAB仿真UR5机器人simulink simscape 自制建模
正向运动学,逆向运动学
关节空间轨迹规划 五次多项式轨迹规划
笛卡尔空间轨迹规划 直线插补
还包含机器人工具箱建立的模型对比
YID:73240667406909214爱小马的海盐大傻
在上方输入框输入您的关键词,然后点击搜索,词语越短越好(2个字最佳)
QQ客服:27699885 微信客服:shujuqudong1 微信客服:shujuqudong6
本站为优质资料,数量有限,如果找不到需求,可查阅全站 https://wekup.cn/ 资源更丰富


