自动驾驶横纵向耦合控制-复现Apollo横纵向控制
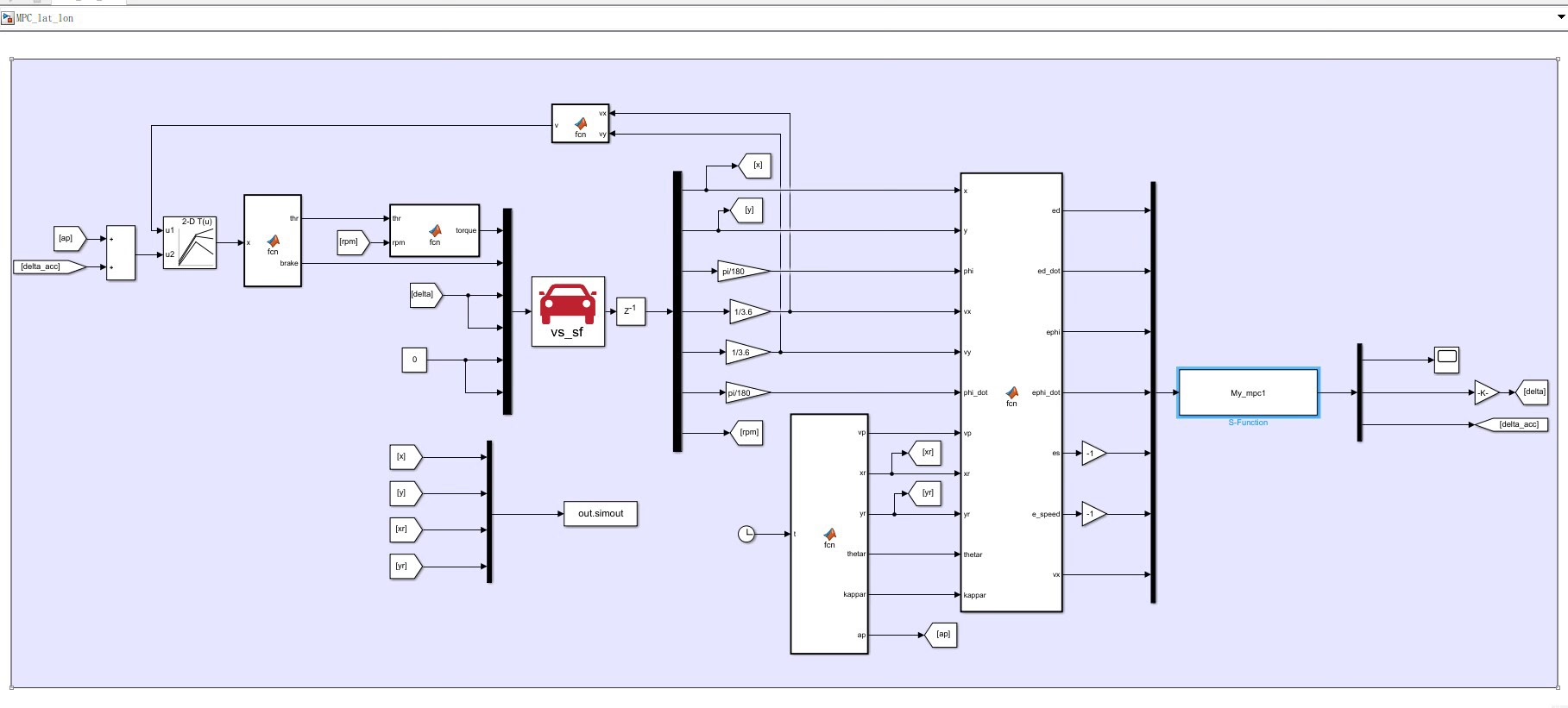
基于动力学误差模型,使用mpc算法,一个控制器同时控制横向和纵向,实现横纵向耦合控制
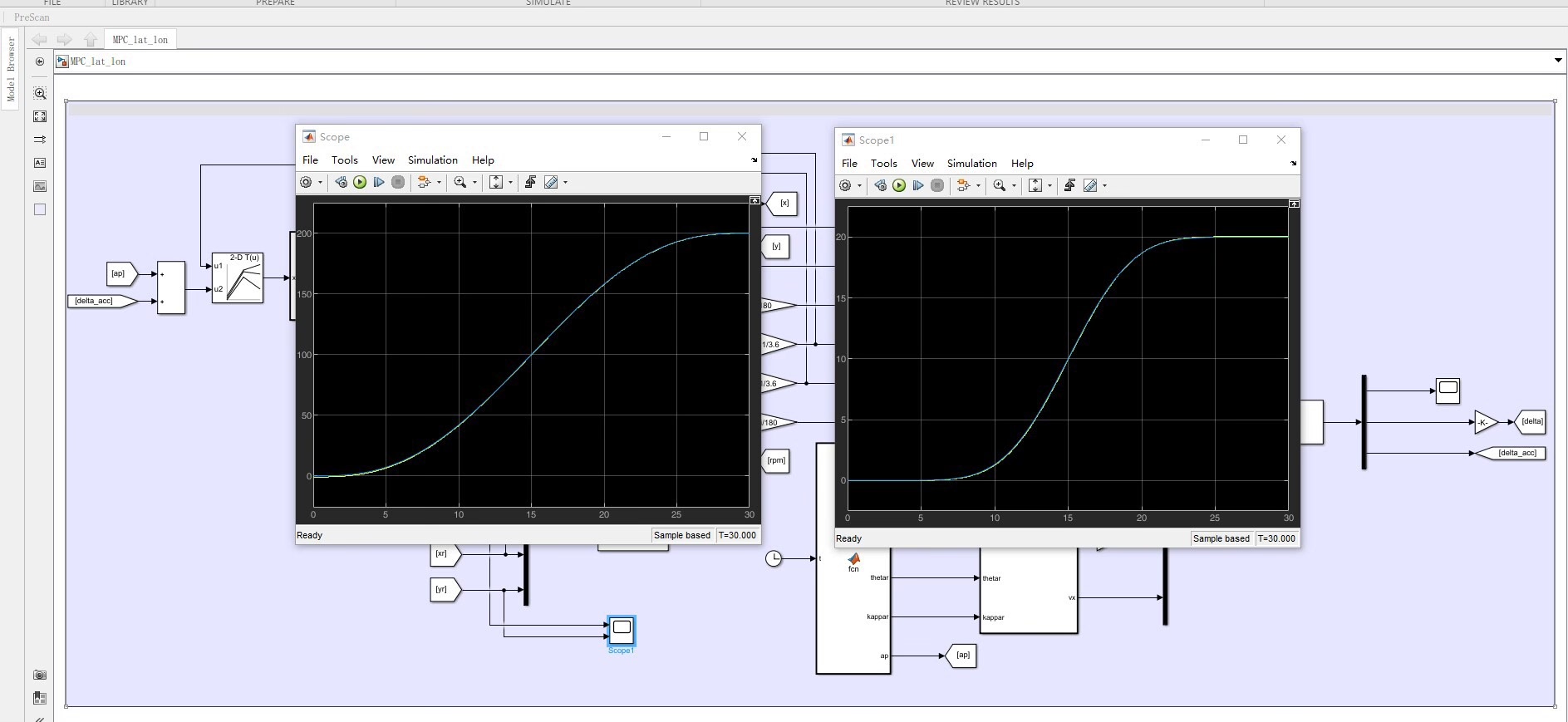
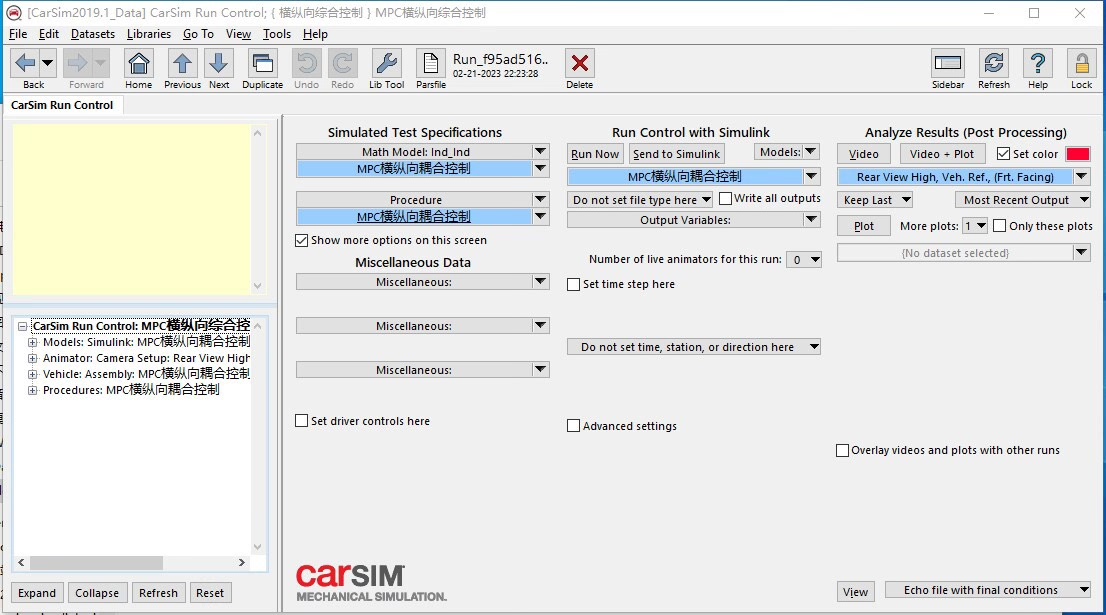
matlab与simulink联合仿真,纵向控制已经做好油门刹车标定表,跟踪五次多项式换道轨迹,效果完美。
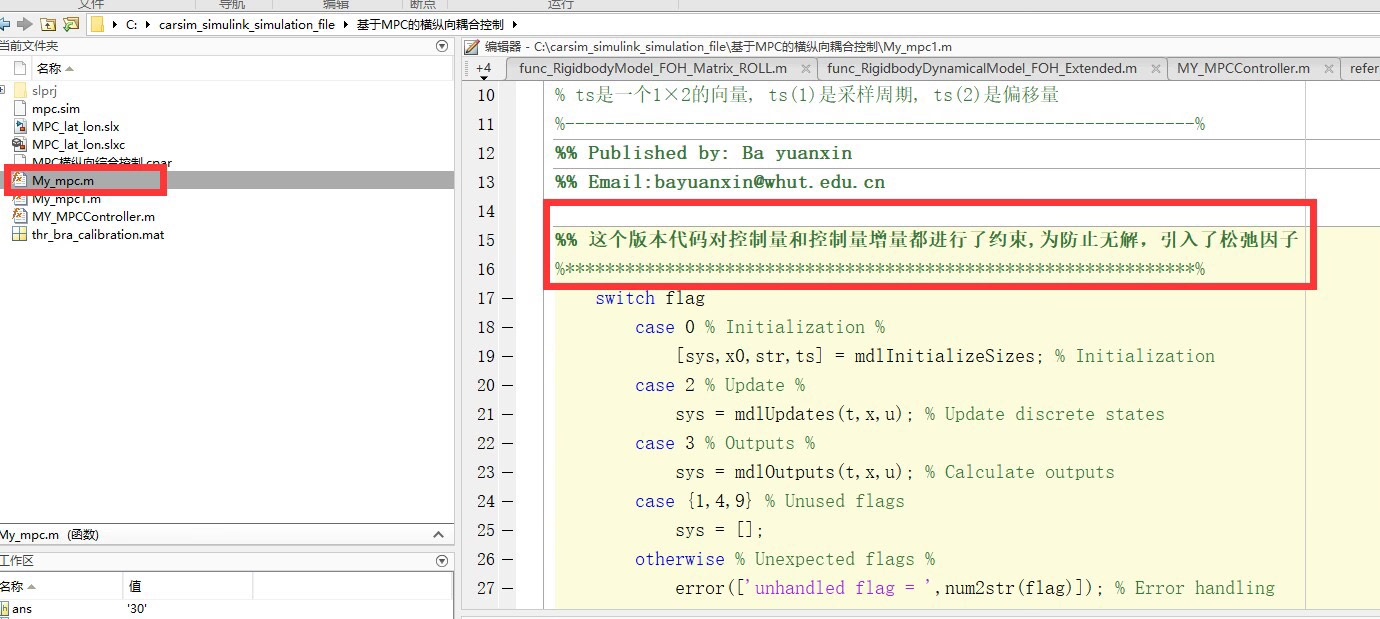
内含三套代码,两套采用面向对象编程-一套只对控制量添加约束,一套对控制量和控制增量均添加约束,另外一套采用面向过程编程。
YID:94120704691994255 xin123
xin123

自动驾驶横纵向耦合控制-复现Apollo横纵向控制
基于动力学误差模型,使用mpc算法,一个控制器同时控制横向和纵向,实现横纵向耦合控制
matlab与simulink联合仿真,纵向控制已经做好油门刹车标定表,跟踪五次多项式换道轨迹,效果完美。
内含三套代码,两套采用面向对象编程-一套只对控制量添加约束,一套对控制量和控制增量均添加约束,另外一套采用面向过程编程。
YID:94120704691994255xin123
在上方输入框输入您的关键词,然后点击搜索,词语越短越好(2个字最佳)
QQ客服:27699885 微信客服:shujuqudong1 微信客服:shujuqudong6
本站为优质资料,数量有限,如果找不到需求,可查阅全站 https://wekup.cn/ 资源更丰富


