电动汽车定速巡航控制器
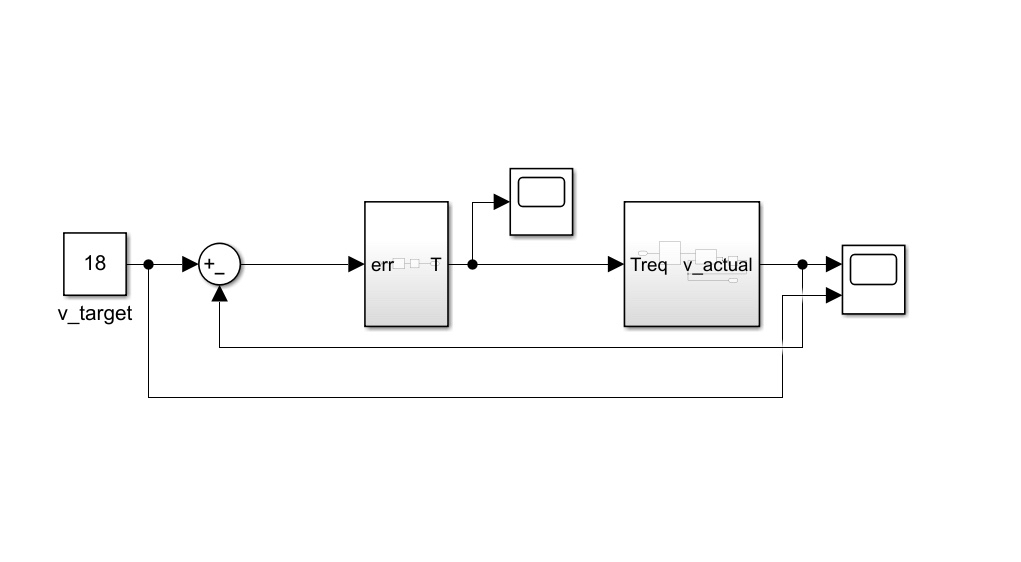
基于整车纵向动力学作为仿真模型
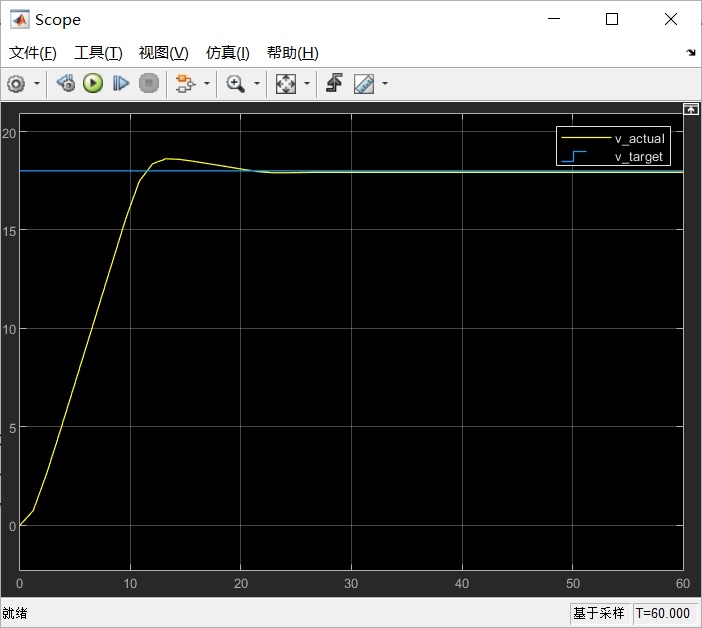
输入为目标车速,输出为驱动力矩、实际车速,包含PID模块
控制精度在0.2之内,定速效果非常好
自主开发,详细讲解,包含
资料内含.slx文件、论文介绍
YID:6649675040889645 1874发哥
1874发哥
电动汽车定速巡航控制器
基于整车纵向动力学作为仿真模型
输入为目标车速,输出为驱动力矩、实际车速,包含PID模块
控制精度在0.2之内,定速效果非常好
自主开发,详细讲解,包含
资料内含.slx文件、论文介绍
YID:66496750408896451874发哥
在上方输入框输入您的关键词,然后点击搜索,词语越短越好(2个字最佳)
QQ客服:27699885 微信客服:shujuqudong1 微信客服:shujuqudong6
本站为优质资料,数量有限,如果找不到需求,可查阅全站 https://wekup.cn/ 资源更丰富


