从零学习自动驾驶Lattice规划算法(下) 轨迹采样 轨迹评估 碰撞检测
包含matlab代码实现和cpp代码实现,方便对照学习。
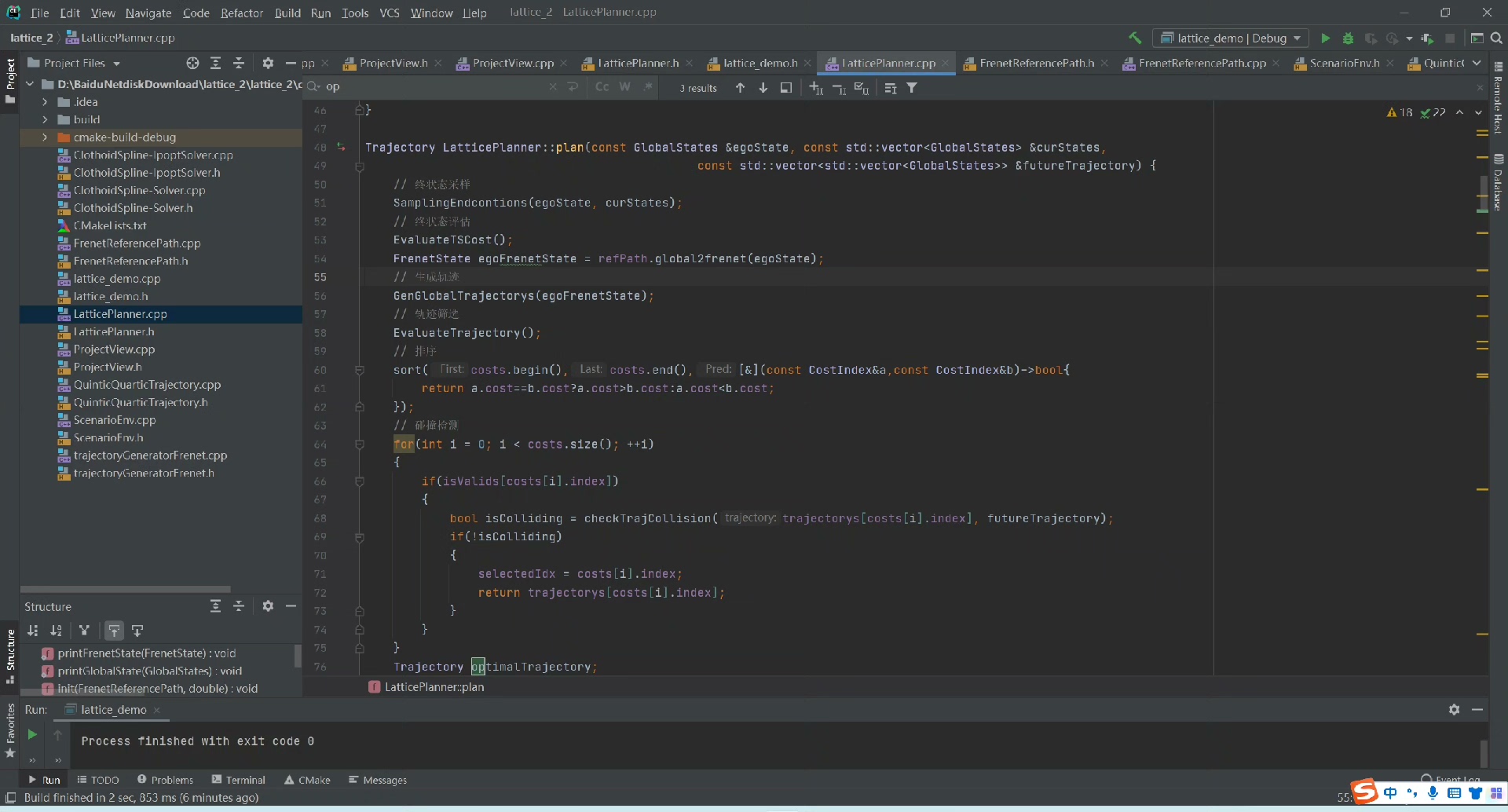
cpp代码用vs2019编译 依赖qt5.15做可视化
更新:
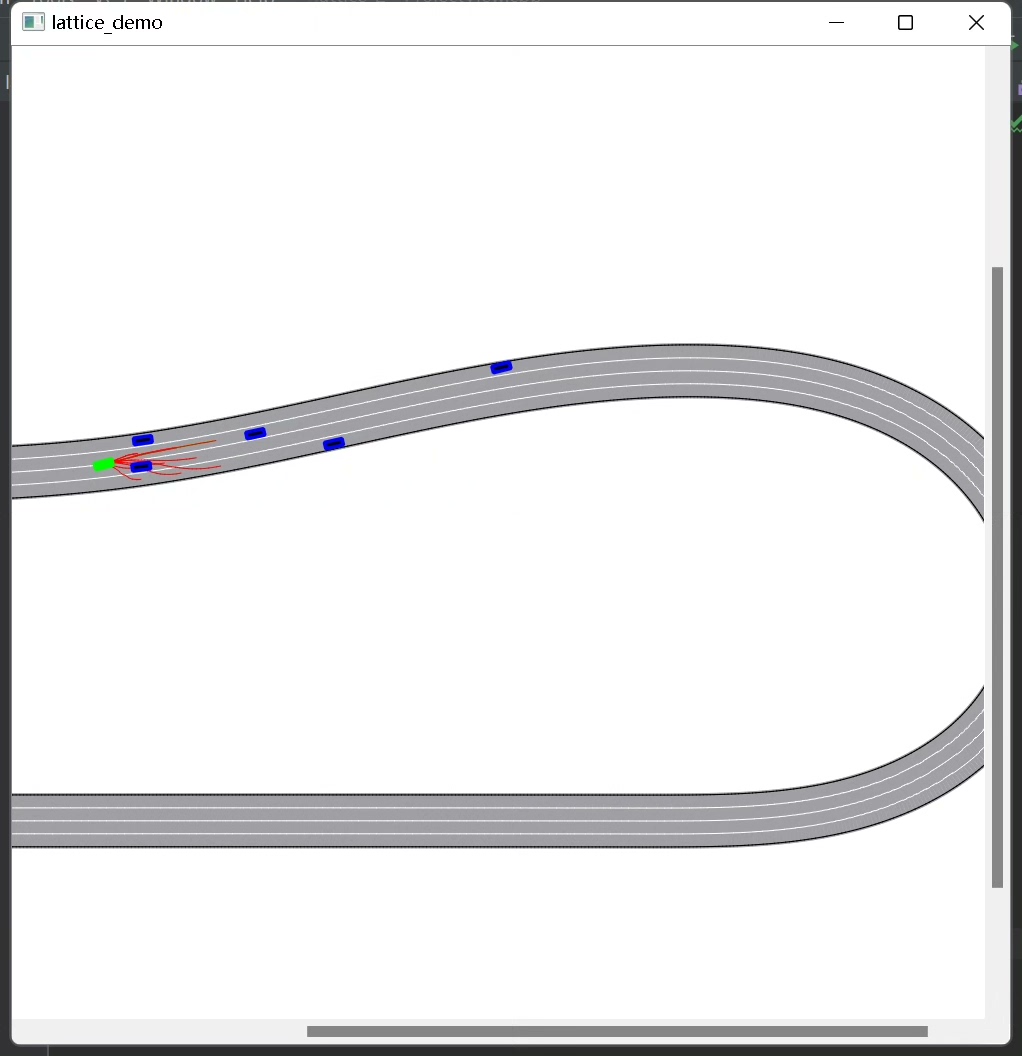
1 优化绘图
2 增加轨迹预测模块
3 增加从mat文件加载场景的功能,方便场景自定义
YID:99120693209878081 autorobot
autorobot
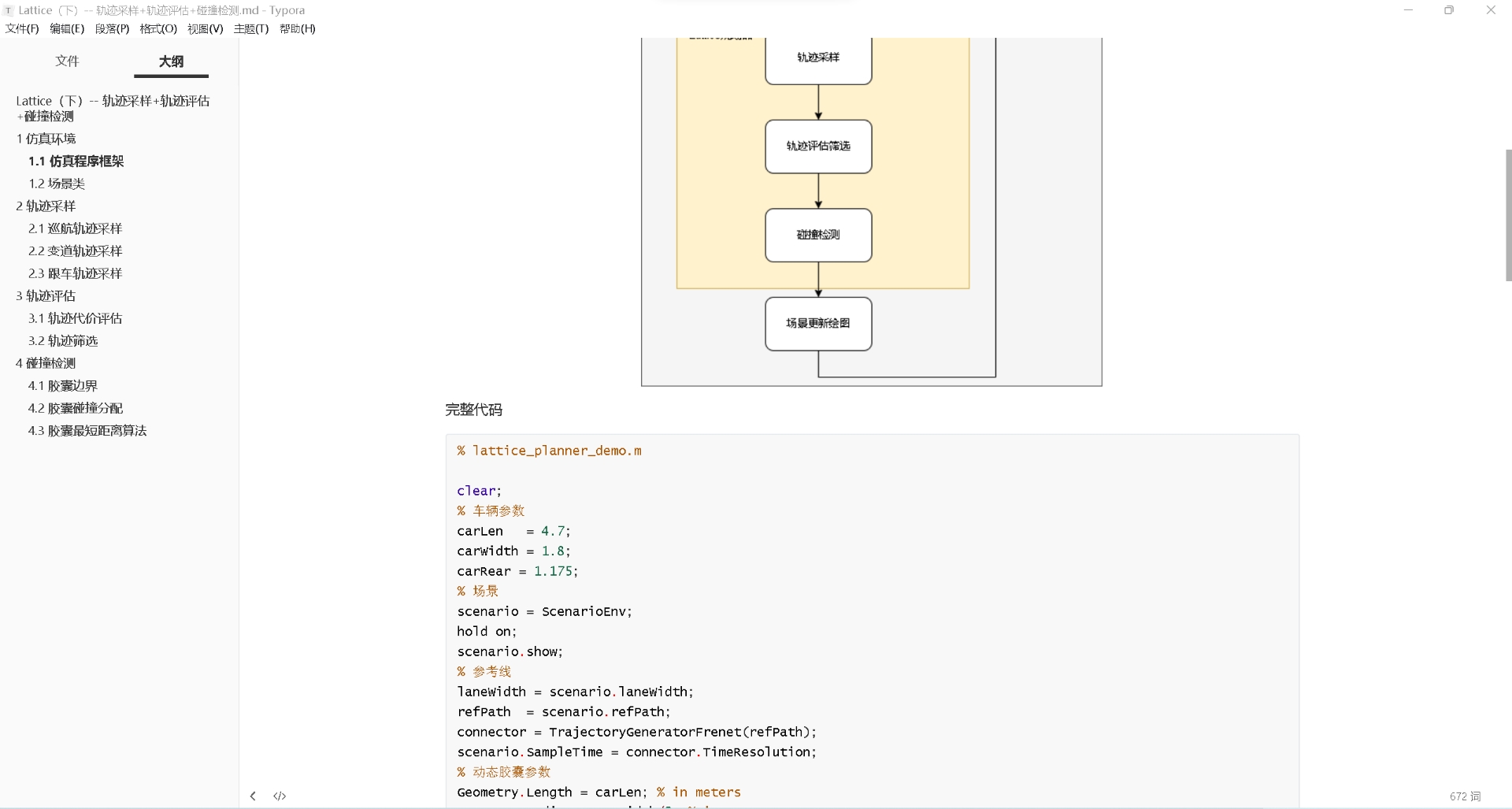
从零学习自动驾驶Lattice规划算法(下) 轨迹采样 轨迹评估 碰撞检测
包含matlab代码实现和cpp代码实现,方便对照学习。
cpp代码用vs2019编译 依赖qt5.15做可视化
更新:
1 优化绘图
2 增加轨迹预测模块
3 增加从mat文件加载场景的功能,方便场景自定义
YID:99120693209878081autorobot
在上方输入框输入您的关键词,然后点击搜索,词语越短越好(2个字最佳)
QQ客服:27699885 微信客服:shujuqudong1 微信客服:shujuqudong6
本站为优质资料,数量有限,如果找不到需求,可查阅全站 https://wekup.cn/ 资源更丰富


