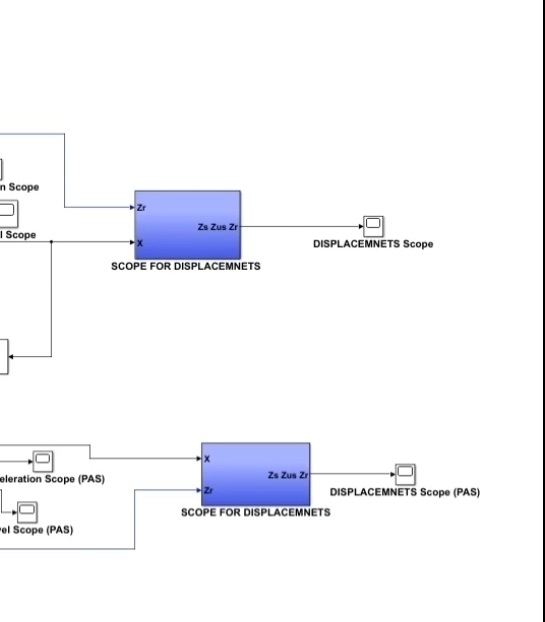
基于lqr的主动悬架控制与被动悬架的性能仿真表现(matlabsimulink)对比,模型为四分之一模型。
扰动输入,配套的本程序对应内容资料(伦纹)
YID:95100677788484940 mpc跟踪控制
mpc跟踪控制
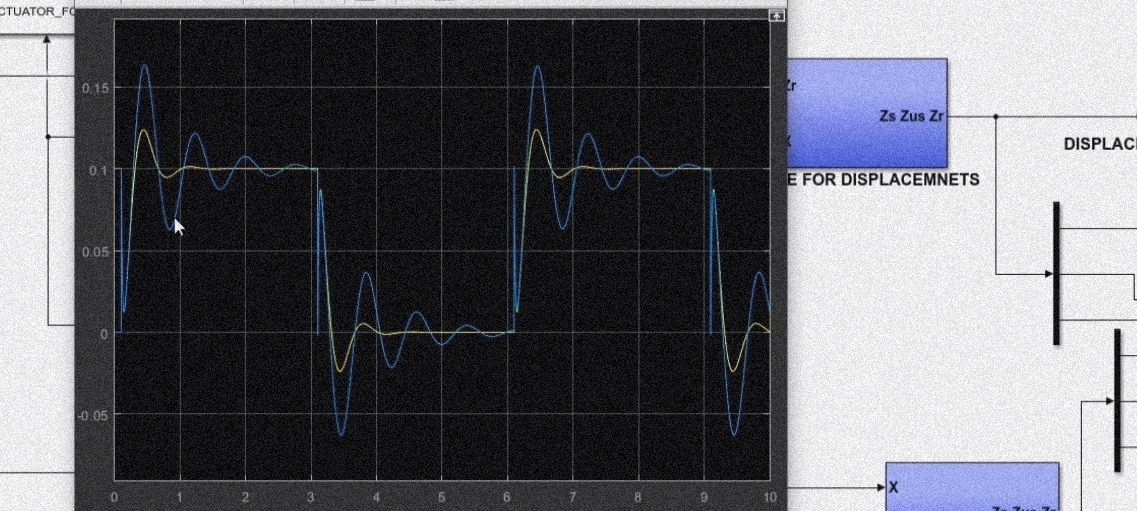
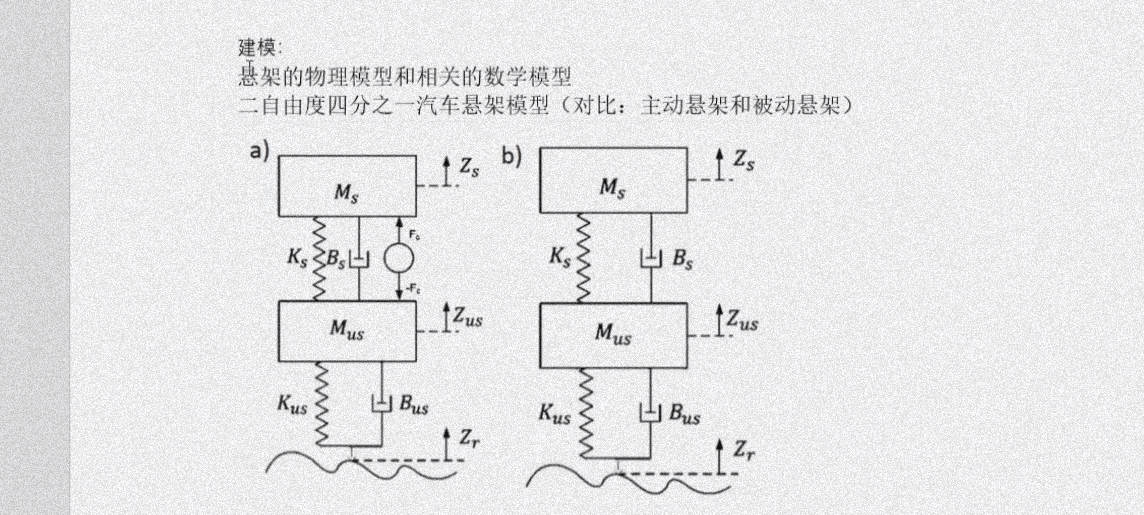
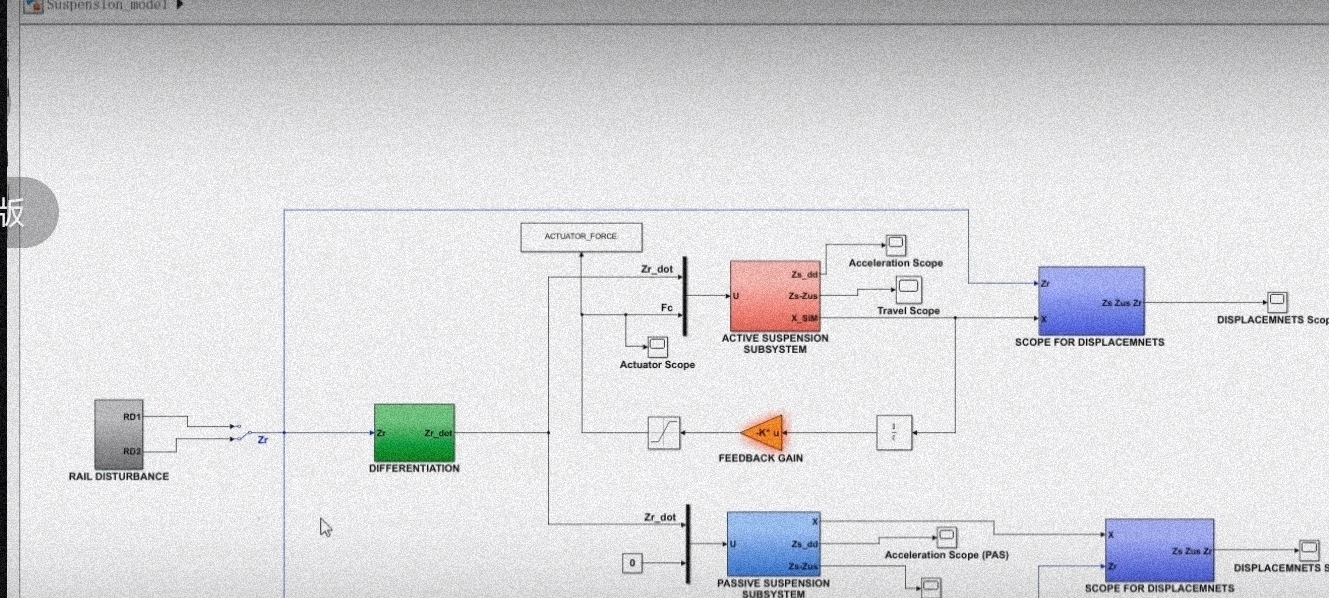
基于lqr的主动悬架控制与被动悬架的性能仿真表现(matlabsimulink)对比,模型为四分之一模型。
扰动输入,配套的本程序对应内容资料(伦纹)
YID:95100677788484940mpc跟踪控制
在上方输入框输入您的关键词,然后点击搜索,词语越短越好(2个字最佳)
QQ客服:27699885 微信客服:shujuqudong1 微信客服:shujuqudong6
本站为优质资料,数量有限,如果找不到需求,可查阅全站 https://wekup.cn/ 资源更丰富


