电动汽车纵向速度MPC控制器。
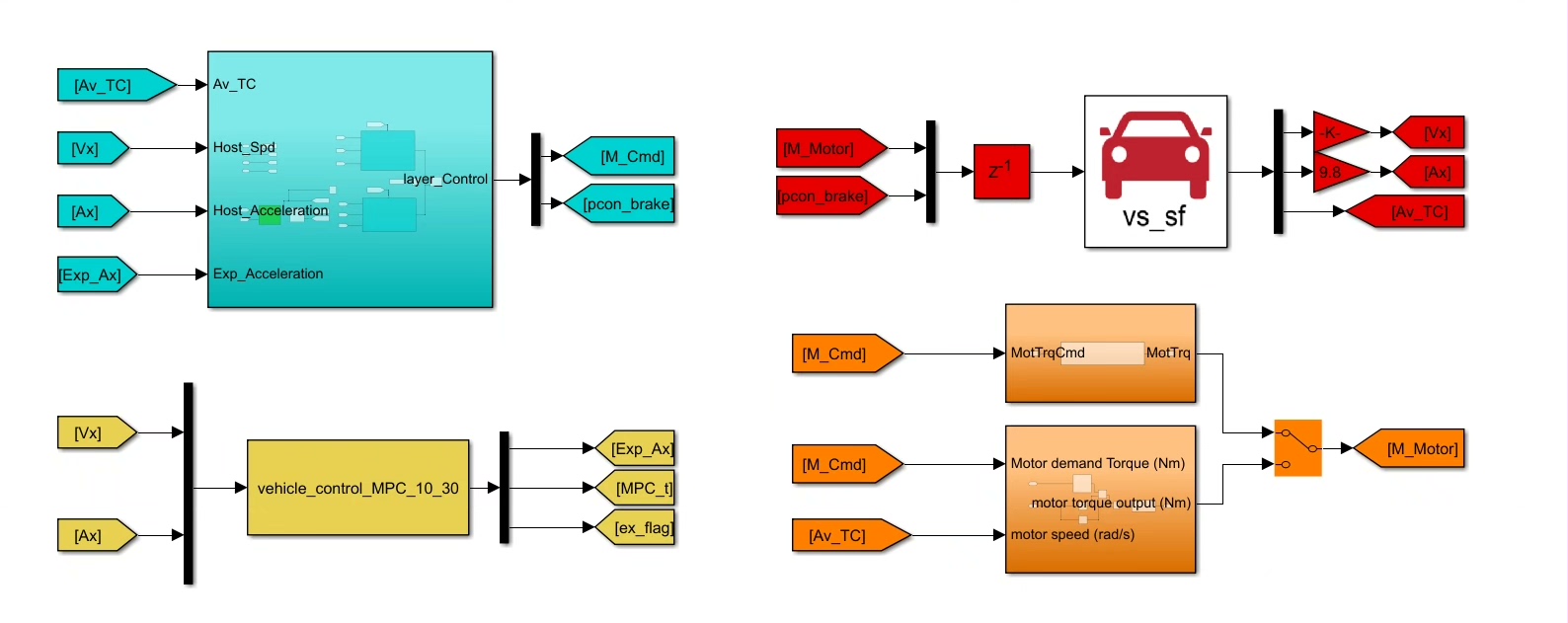
采用上层控制器和下层控制器。
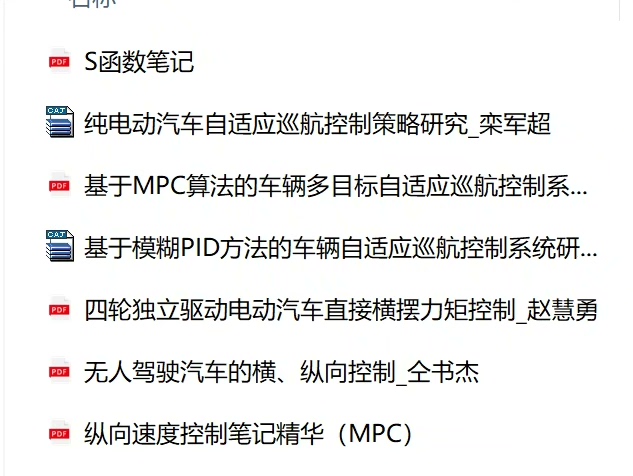
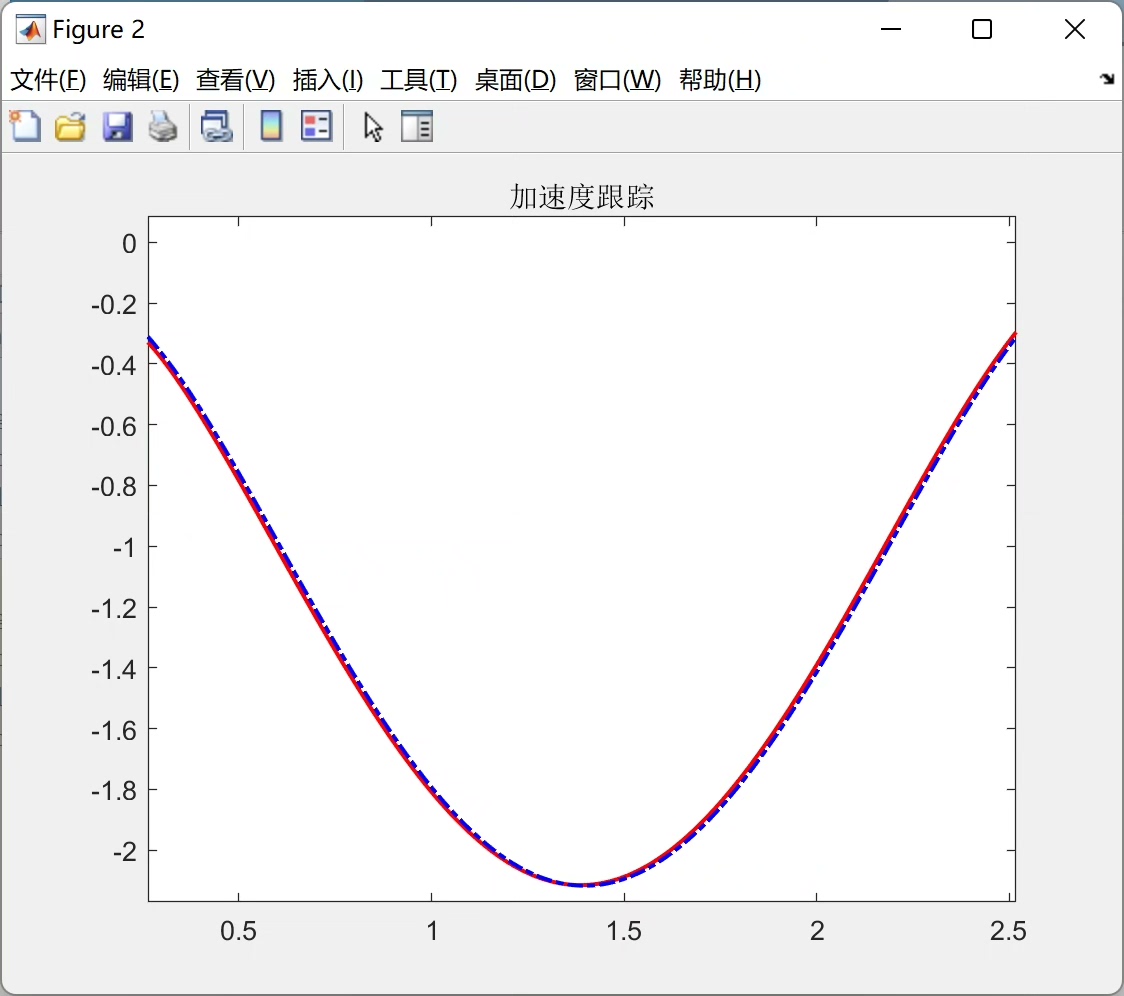
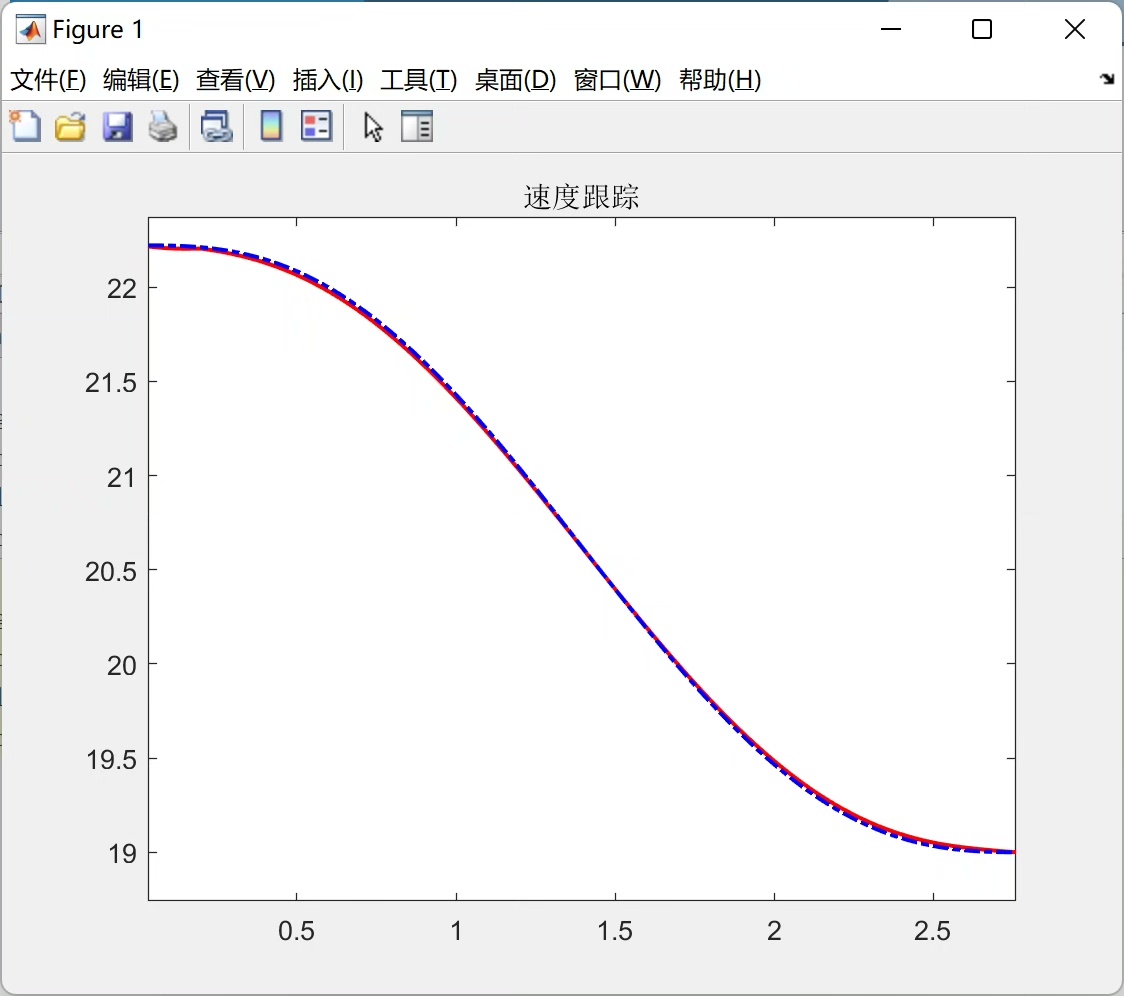
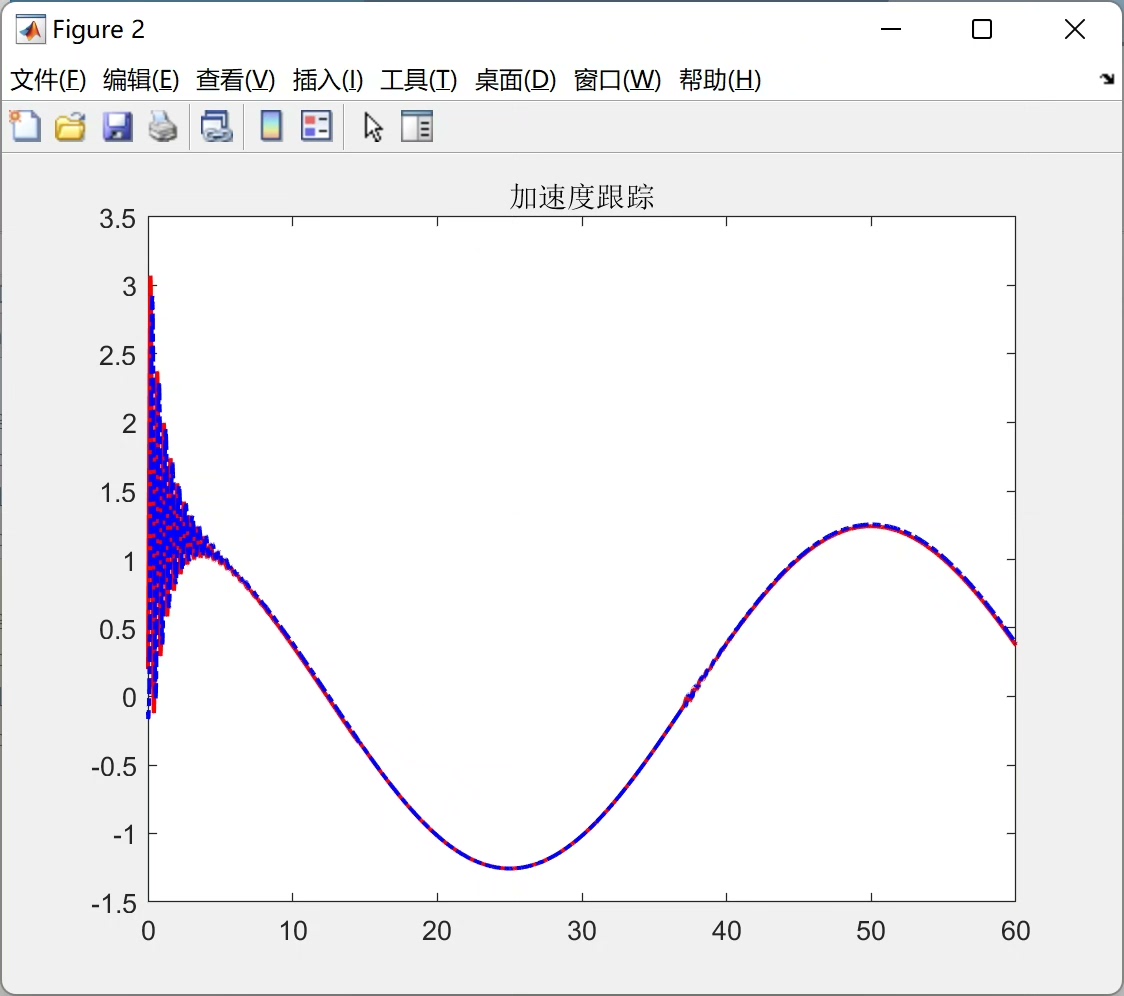
目标为控制车辆的纵向速度,使其跟踪上期望纵向速度曲线。
●上层控制器:控制方式为MPC控制器,输入为车辆纵向速度和纵向加速度,输出为期望加速度,并且对加速度增加进行约束。
●下层控制器:车辆的制动根据逆向纵向动力学模型搭建、车辆的驱动根据电机MAP图搭建。
包含驱动制动切换逻辑、PID控制器等模块。
●可实现正弦速度曲线的速度加速度的准确跟踪,以及五次多项式速度曲线的速度和加速度跟踪。
YID:34116755731096434 太平洋攀岩南瓜
太平洋攀岩南瓜